Il y a quelques mois, vous avez pu lire dans ces colonnes un premier article sur la construction d’un GPSDO, dans l’objectif de délivrer des fréquences de référence pour une utilisation sur le satellite QO-100 et plus largement pour servir à l’étalonnage d’équipements de la station.
C’est un GPS « low-cost », délivrant un signal à 100 KHz stable en fréquence, issu des horloges de référence des systèmes GPS, qui nous permet de verrouiller un oscillateur VC-TCXO par une comparaison de phase entre ce signal et un sous-multiple à 100 KHz de notre oscillateur.
Le comparateur de phase délivre un signal qui après intégration donne une tension continue qui contrôle l’entrée de commande de notre VC-TCXO. Toute variation de phase dans un sens ou dans l’autre va faire varier le rapport cyclique du signal de sortie du comparateur et donc, après intégration, la tension de commande de notre oscillateur pour asservir sa fréquence.
Voila pour le principe.
Même si la version décrite donne entière satisfaction pour le trafic actuel sur la station QO-100, le système a ses défauts et ses limites, liées pour parties à la qualité du signal issu de notre GPS mais aussi aux caractéristiques propres de l’oscillateur VC-TCXO choisi.

5x7 mm
Le VC-TCXO choisi au départ est le modèle ASVV-40.000MHZ-N102-T d’Abracon, choisi pour son prix attractif à moins de 5€ et ses caractéristiques en bruit de phase.
Le GPS.

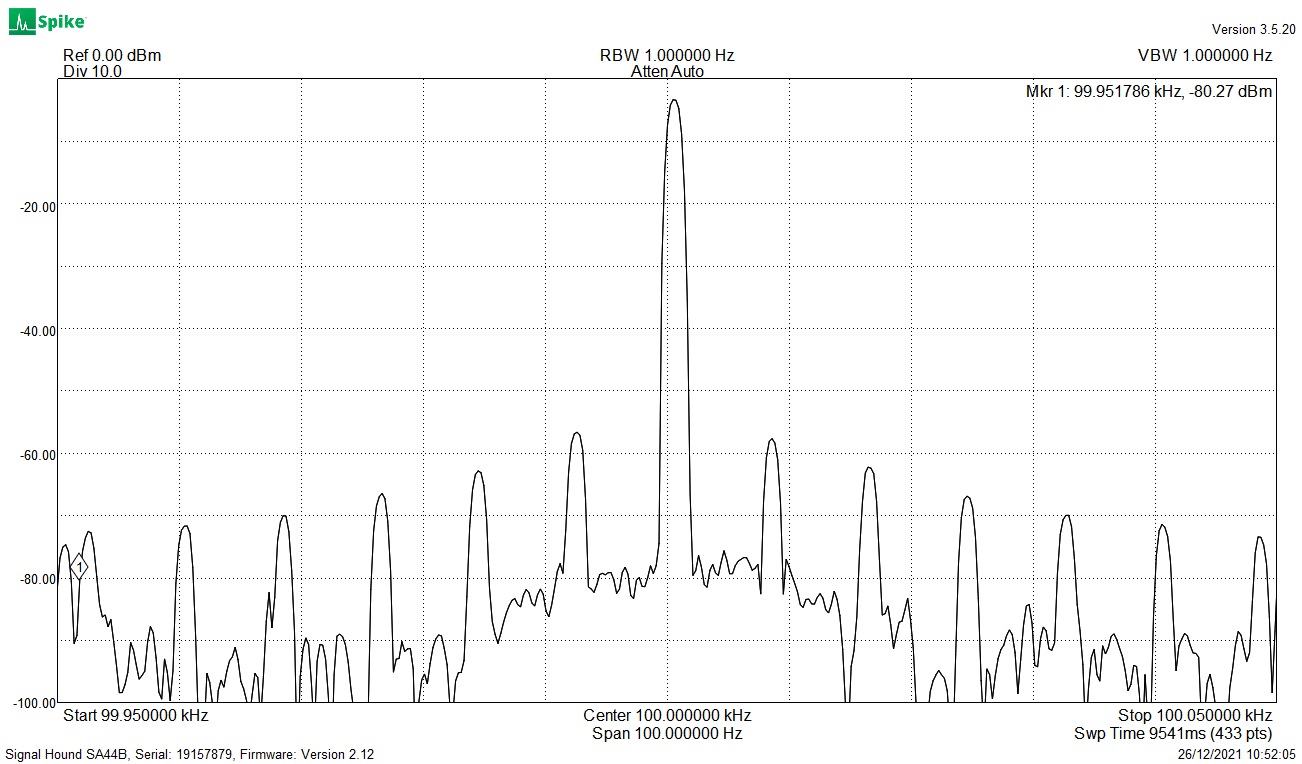
Ces modules très bons marchés, moins de 10 €, ont un petit défaut : s’ils délivrent un signal stable en fréquence, le signal de sortie "PPS" que nous avons reprogrammé à 100 KHz est affecté d’un certain jitter (traduction : petit tremblement nerveux ou gigue), vibration autour de la fréquence que l’on peut observer par une analyse très fine au pied de la porteuse. On peut le voir sur cette capture qui analyse une bande de 100 Hz avec une résolution de 1 Hz autour du signal 100 KHz de notre GPS. Ce jitter se concrétise à -50 dB en dessous de la porteuse.
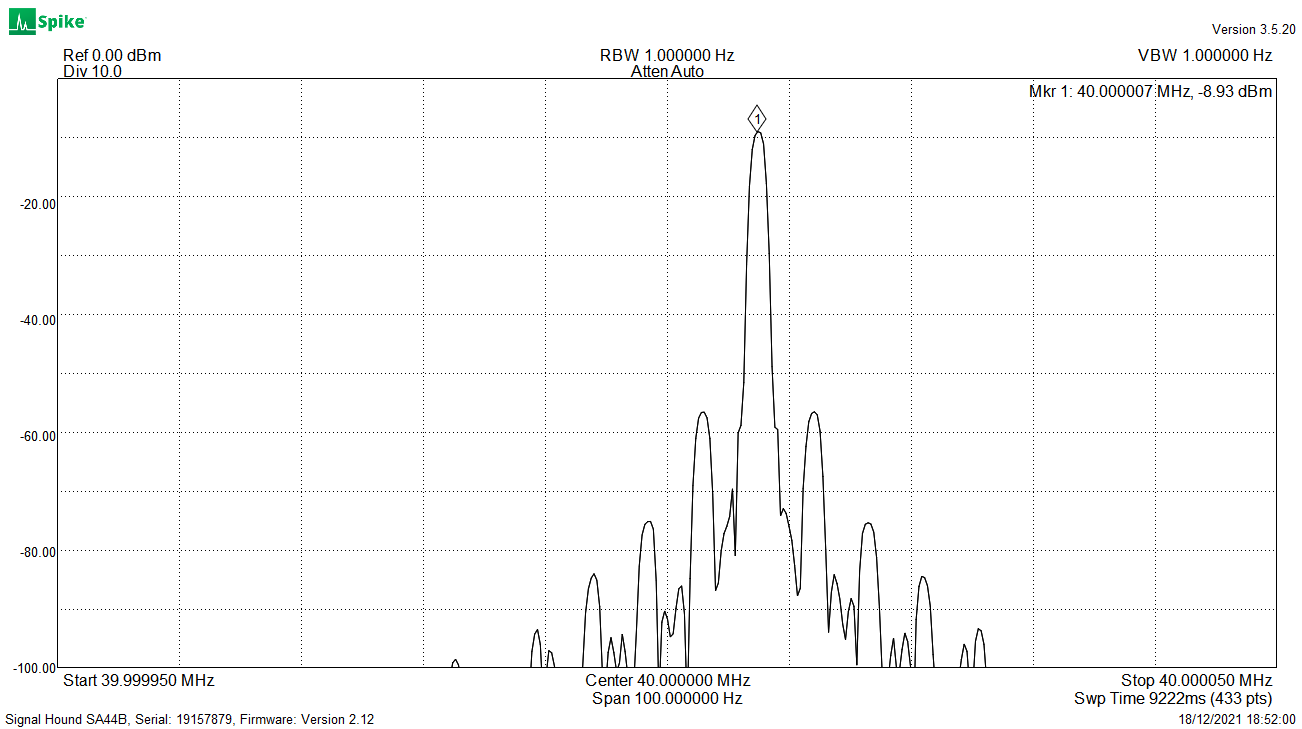
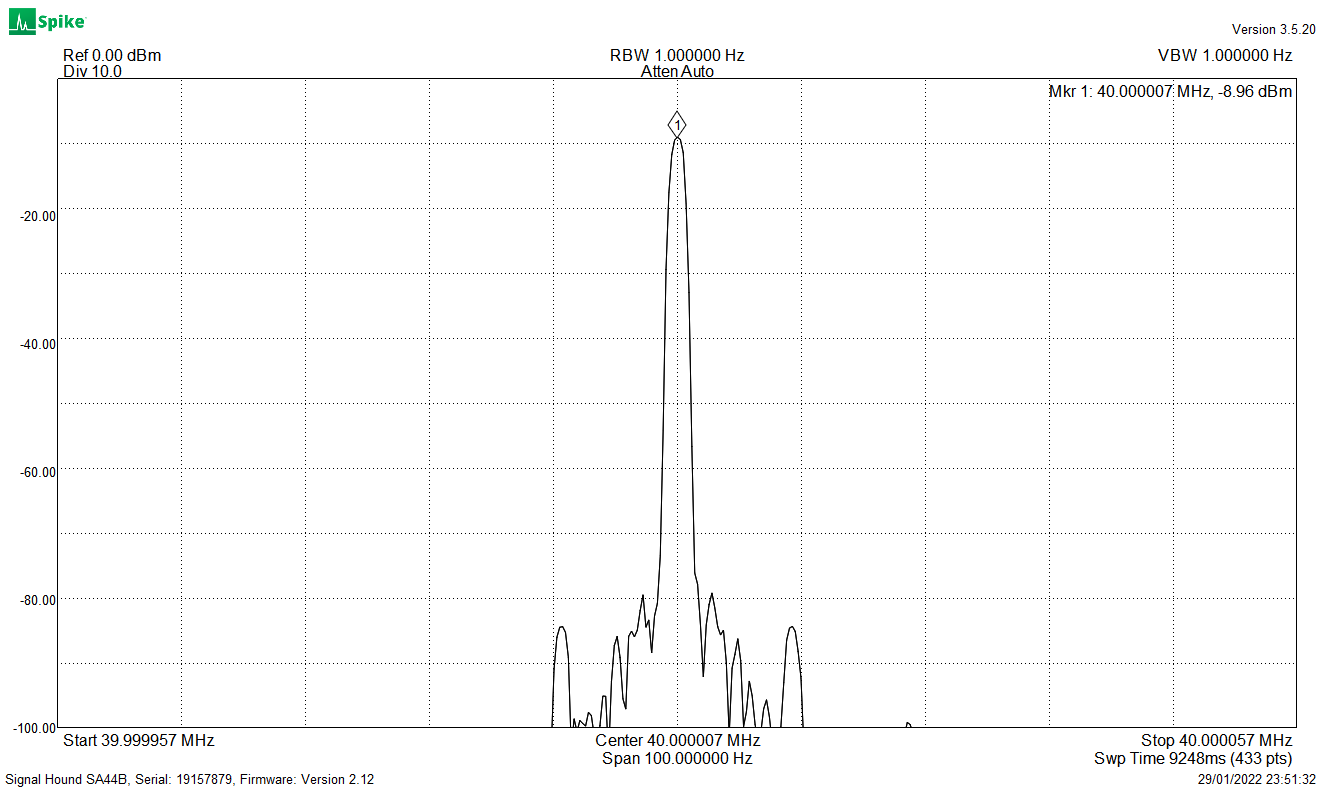
Cela se traduira, après comparaison de phase, intégration du signal et un filtrage à forte constante de temps par une vibration résiduelle à très basse fréquence dont il sera très difficile de se débarrasser. Concrètement, cela se traduira par un jitter sur la fréquence de notre VC-TCXO, en proportion de la sensibilité de son entrée de contrôle, entre -45 et -55 dB de part et d’autre de la porteuse centrale, comme on peut le constater sur la capture suivante.
Ces raies parasites au pied de la porteuse ne sont visibles que si on réduit la fenêtre d’analyse à 100 Hz -le SPAN- et en utilisant une résolution de 1 Hertz pour la bande passante vidéo, RBW/VBW.
Si comme certains le montrent, on analyse sur une largeur de 1 KHz au lieu de 100 Hz, avec une résolution à 10 Hz au lieu de 1 Hz, on ne visualisera rien de ces petits défauts.
Le VC-TCXO
Ses caractéristiques vont elles aussi jouer un rôle dans la génération d’un signal plus ou moins propre dans un contexte de contrôle par signal GPS.
On va choisir notre VC-TCXO en fonction de différents critères dont les principaux sont :
- Son prix qui peut aller de 2 à 100€ et plus.
- Le bruit de phase généré.
- La sensibilité de la tension de contrôle appelé souvent « pulling » dans les caractéristiques ou Kv qui peut aller de +/- 5 PPM à +/- 200 PPM ce qui va donner une très grande sensibilité ou agilité à notre oscillateur dans ce dernier cas.
- La disponibilité commerciale du produit quand on ne peut pas traiter par grande quantité auprès des fabricants et qu’il faut se tourner vers les stocks des distributeurs.
Pour le problème qui nous concerne, c’est un VC-TCXO disponible ayant un pulling de +/- 5PPM que nous devons trouver car le premier testé, le ASVV-40.000MHZ-N102-T, s’il avait une courbe de bruit de phase intéressante, avait un pulling à +/- 100 PPM, donc trop sensible.
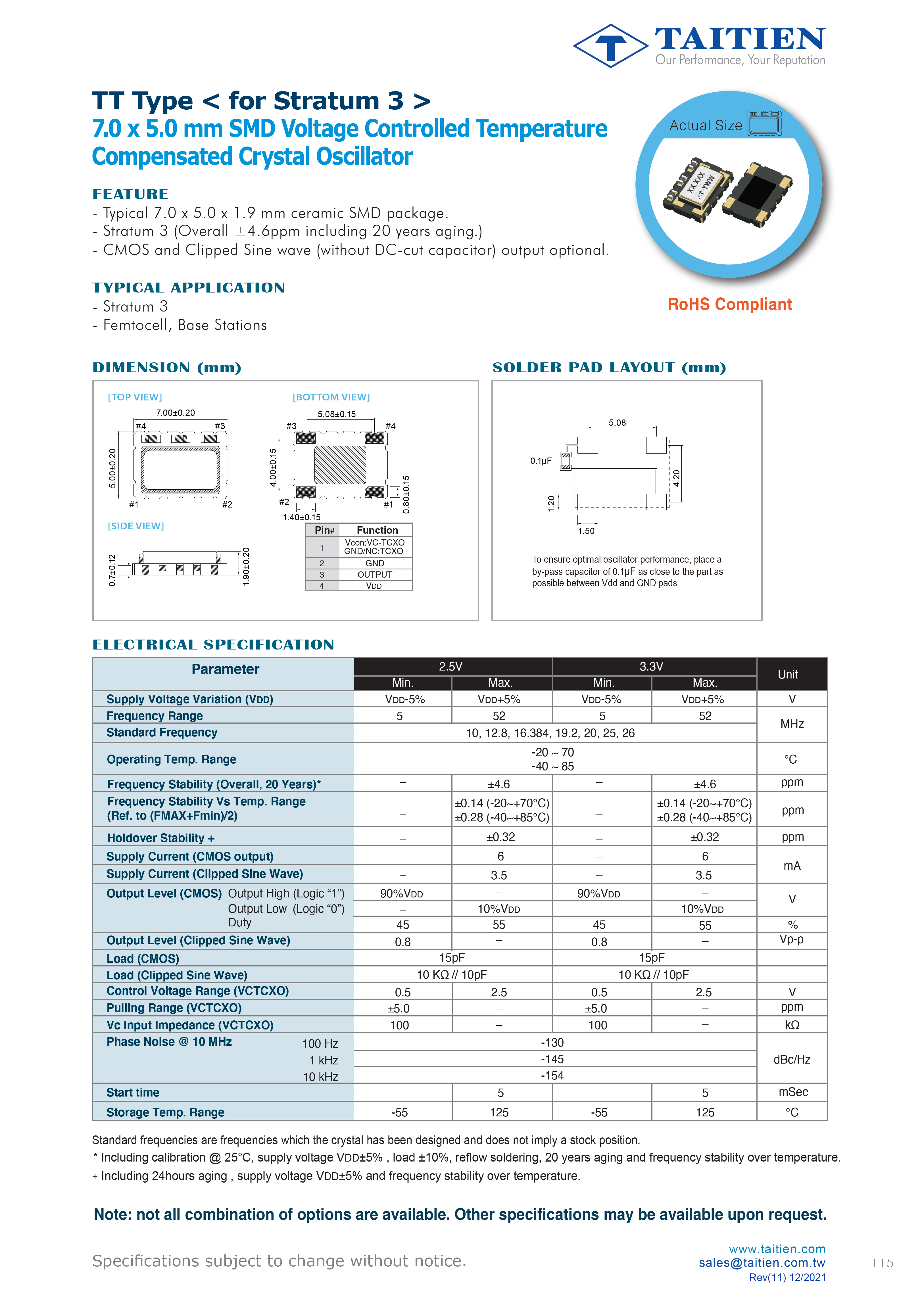
Après de nombreuses recherches chez tous les distributeurs et fabricants, il est ressorti que ce modèle pouvait mieux convenir. TTEATLJANF-40.000000
Distribué par DigiKey à un prix raisonnable de 14€ HT, une disponibilité immédiate, un pulling à +/- 5 PPM et des caractéristiques en phase honorables, comme on peut le voir dans les data-sheet du produit.
Le simple fait de changer ce TCXO sur notre prototype donne la capture suivante, dans les mêmes conditions d’analyse.
Nous pouvons voir les premières « spurious » au pied de porteuse diminuer de 30 à 40 dB.
A titre de comparaison voici l’analyse identique sur un GPSDO réputé de marque Leo-Bodnar.
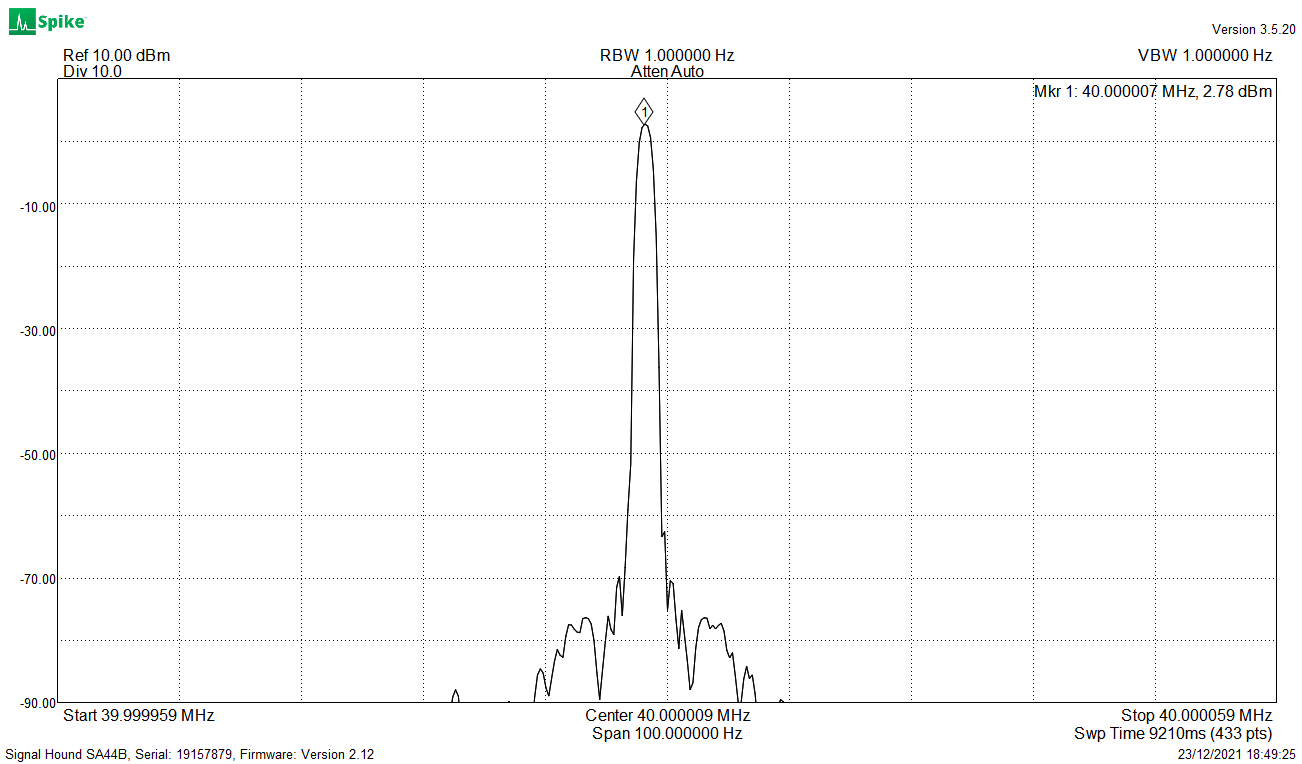
Il n’a pas le même niveau de sortie et la référence est décalée de 10 dB.
Bon, le notre, sur ce plan, n’est pas si mal maintenant.
Autres améliorations.
Pour éviter un couplage entre les signaux 40 MHz et 10 MHz qui passent par des triggers de schmitt 74LV14, nous avons séparé les portes dans deux boitiers différents, un dans lequel les portes ne commuteront que du 40 MHz (U4) et un autre bien séparé pour les signaux 10 MHz (U11). Les trois portes inutilisées de U4 auront leurs entrées mise à la masse.
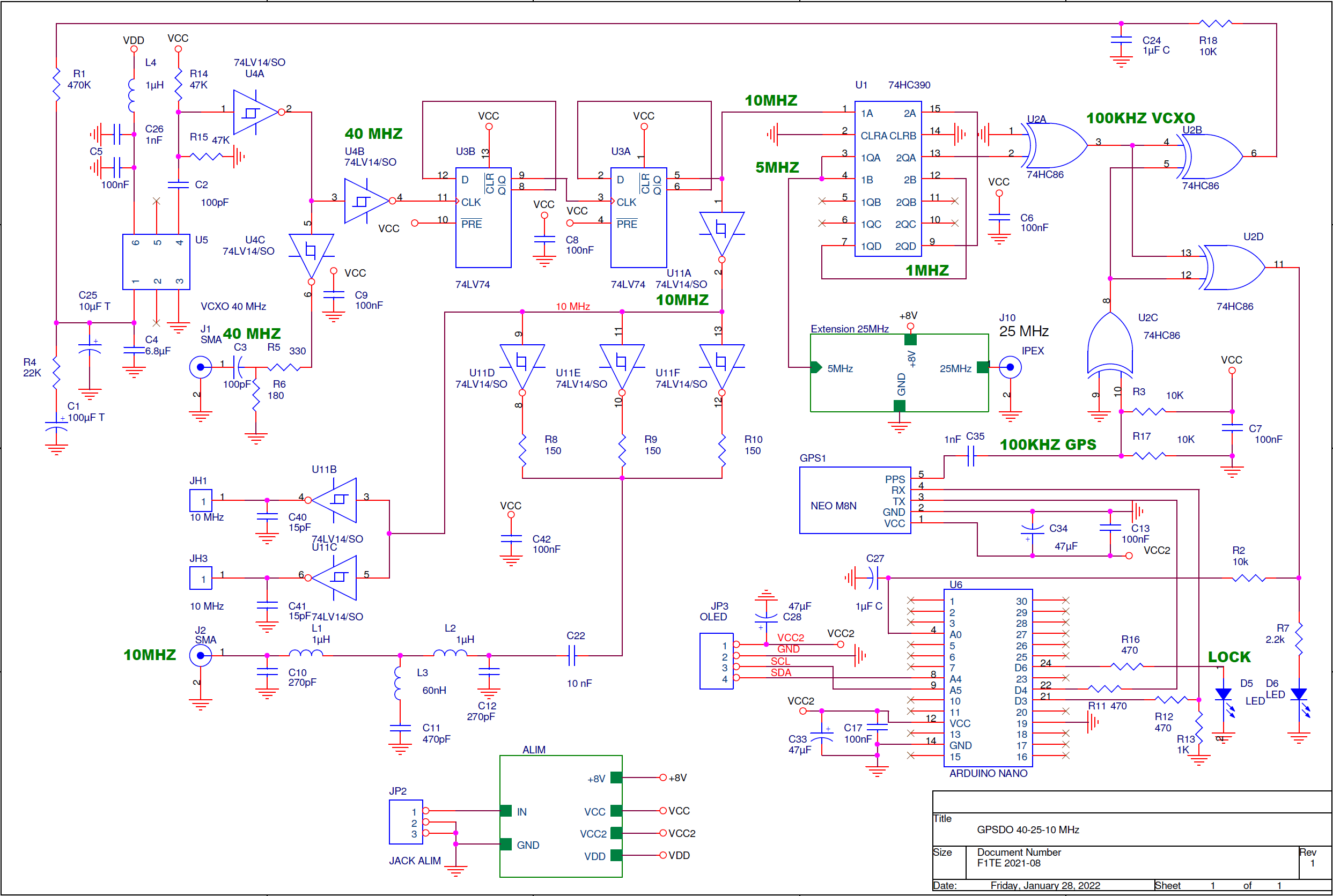
Vous remarquerez deux diodes LED donnant une indication sur le verrouillage du GPSDO.
La diode D6 visualise la tension moyenne sortie du comparateur de phase. Elle va donc clignoter pendant toute la phase d'approche et sa luminosité va se stabiliser lors de ce verrouillage.
Le diode D5 elle est contrôlée par le soft de l'Arduino. Le programme fait une mesure analogique sur la valeur d'intégration du même signal issu du comparateur de phase. Il fait une moyenne glissante de la tension et quand celle-ci est stabilisée, il allume la LED de façon permanente.
Le signal à 25 MHz se fait toujours par l’extraction de l’harmonique 5 au niveau du diviseur à 5 MHz.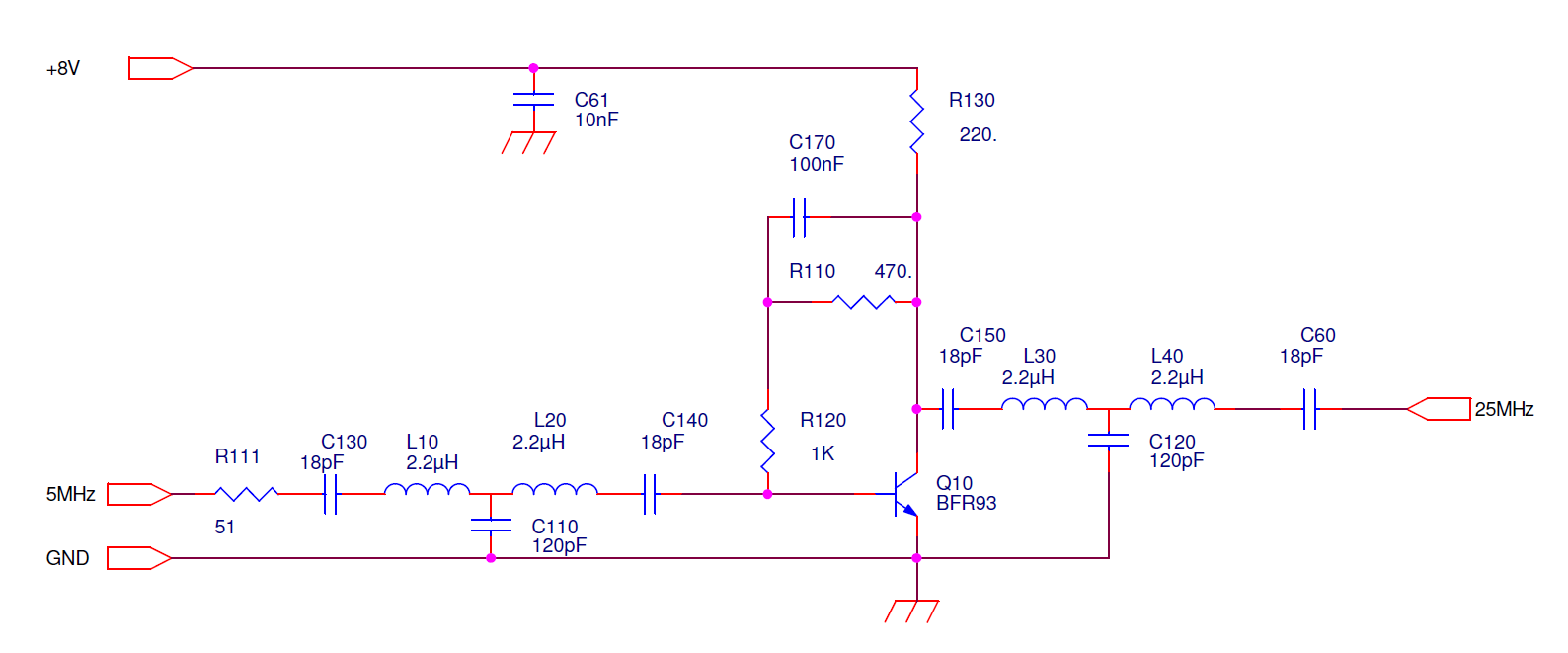
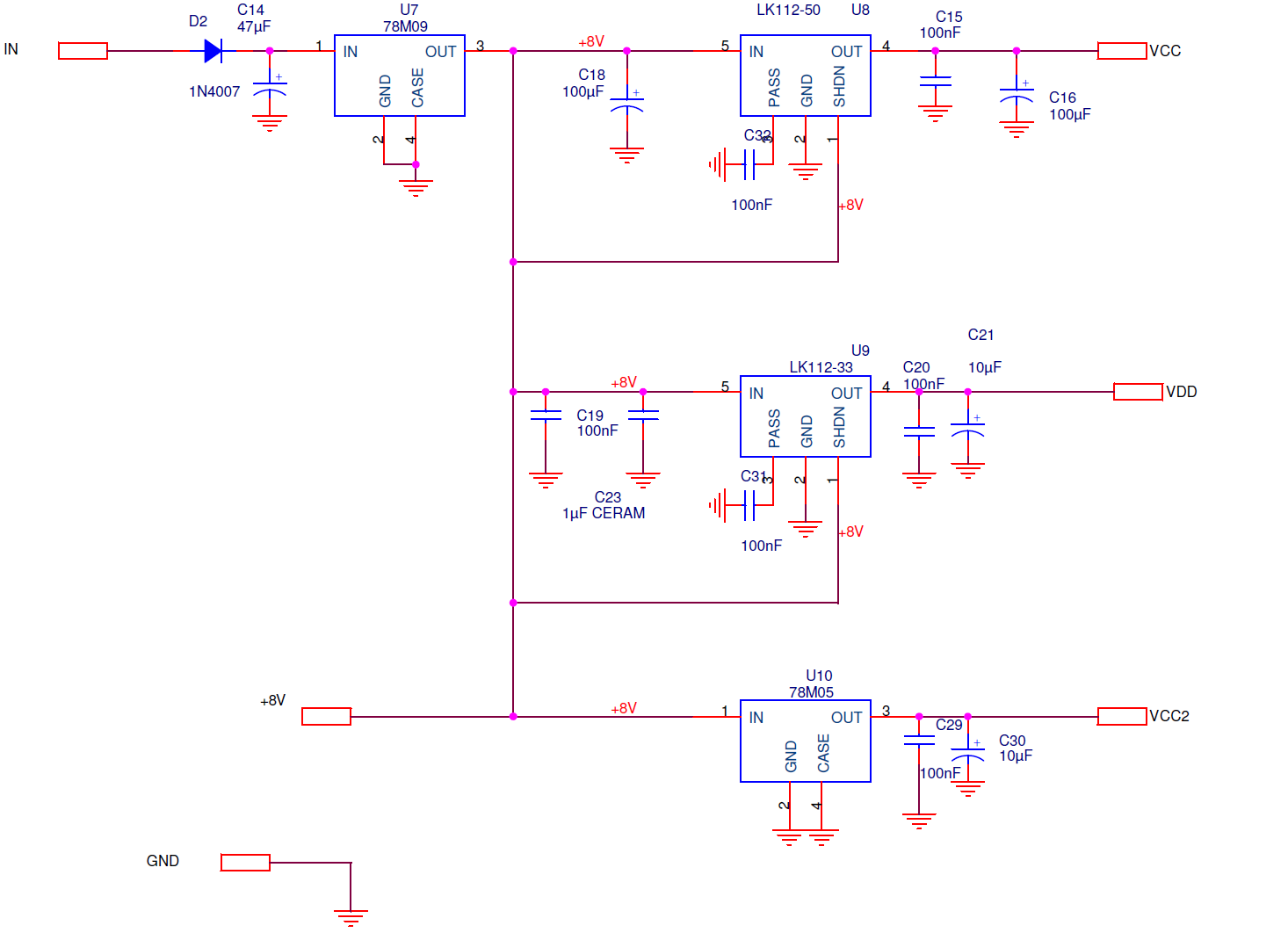
La partie alimentation est inchangée.
On fait une pré-régulation à 8 V pour alimenter les autres régulateurs.
- Un premier régulateur 5 V "Low noise" pour la logique.
- Un second régulateur 3.3 V "Low-noise" pour le VC-TCXO
- Un troisième régulateur 5 V standard pour l'Arduino et le GPS
Cette séparation des circuits d'alimentation a pour but de réduire au maximum les remontées de bruit vers le VC-TCXO par les circuits d'alimentation.
U7 peut être un 78M08 ou 78M09, 8 ou 9 V.
Le circuit imprimé.
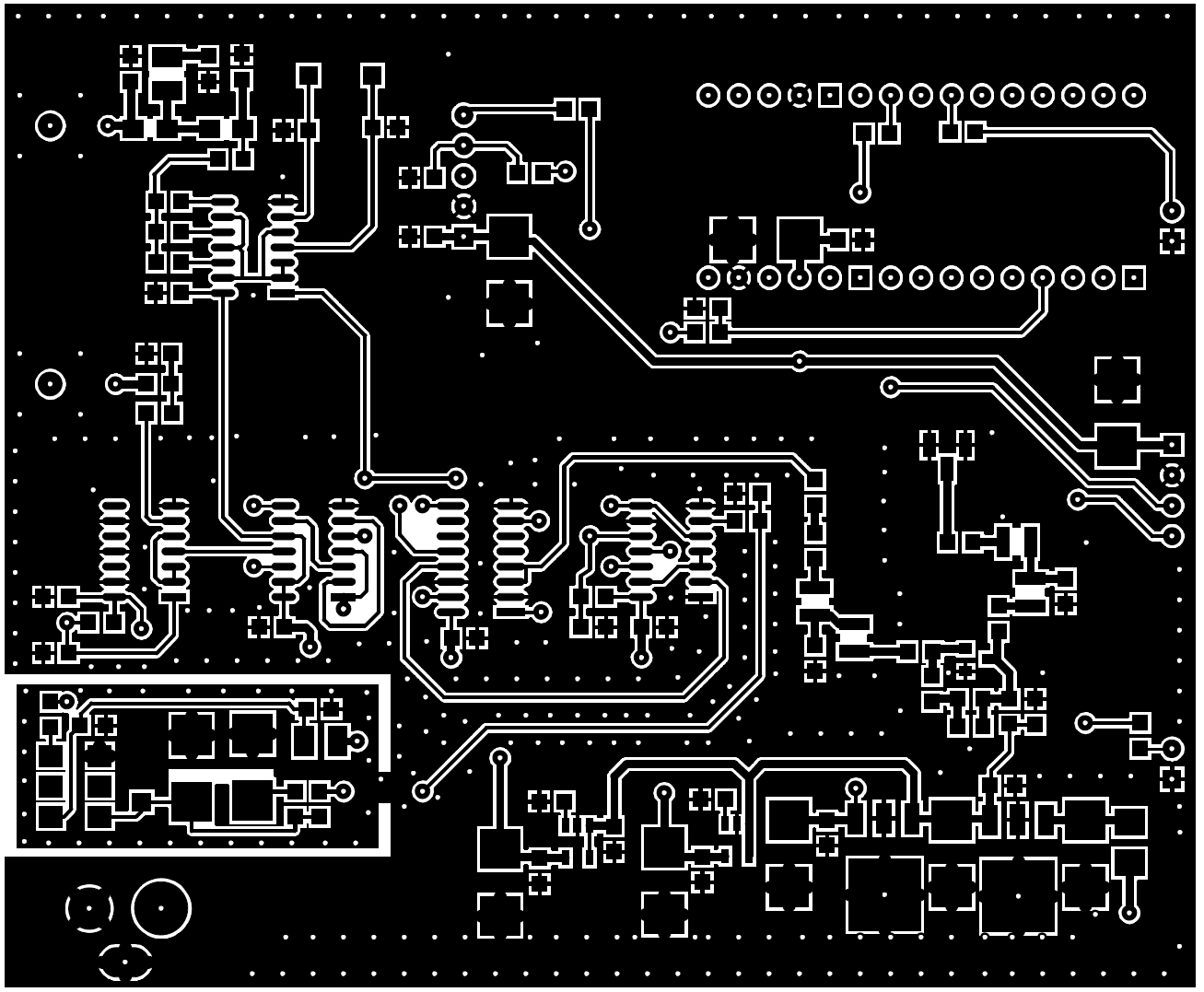
PCB face TOP
100 X 82 mm
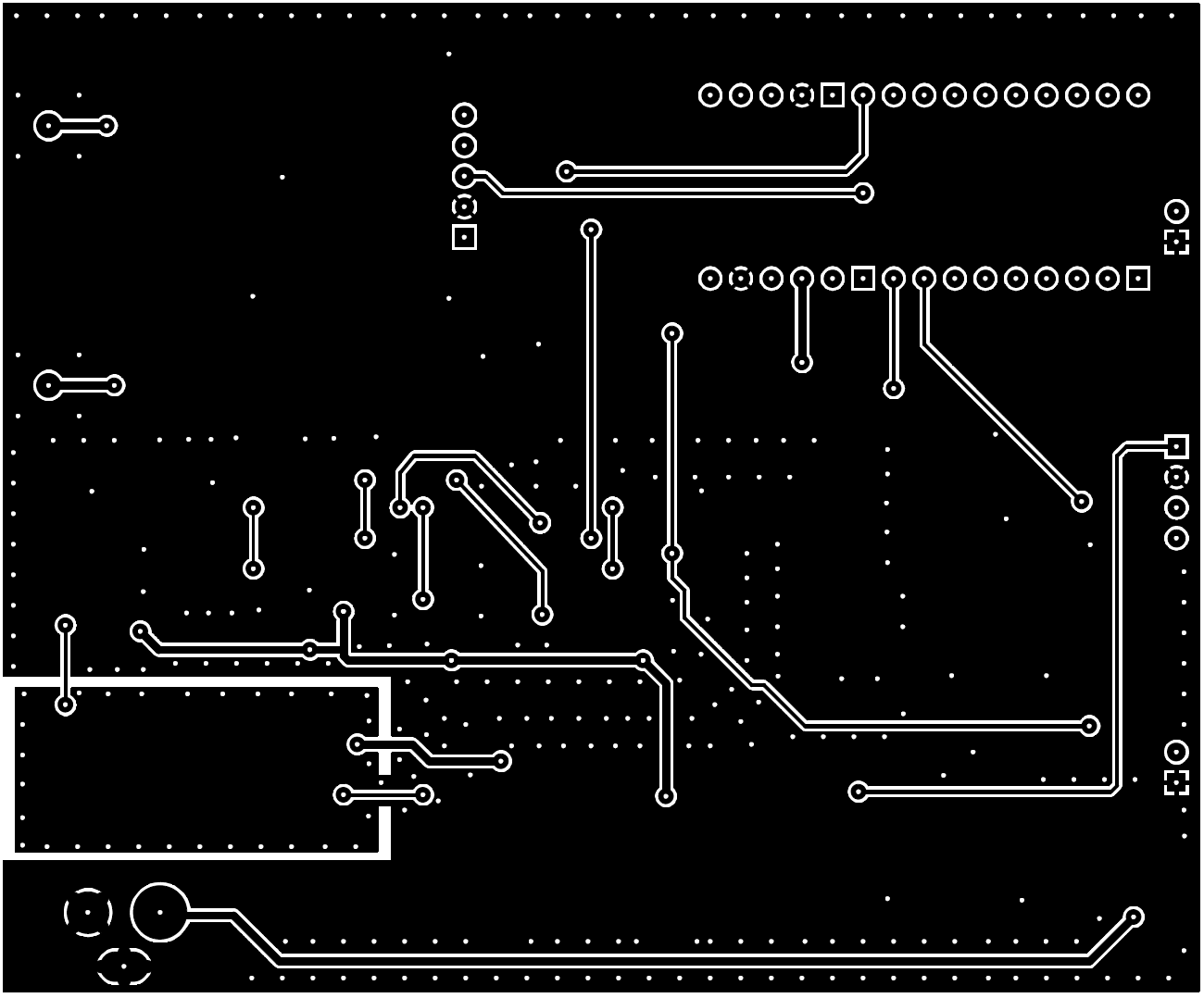
PCB face BOTTOM
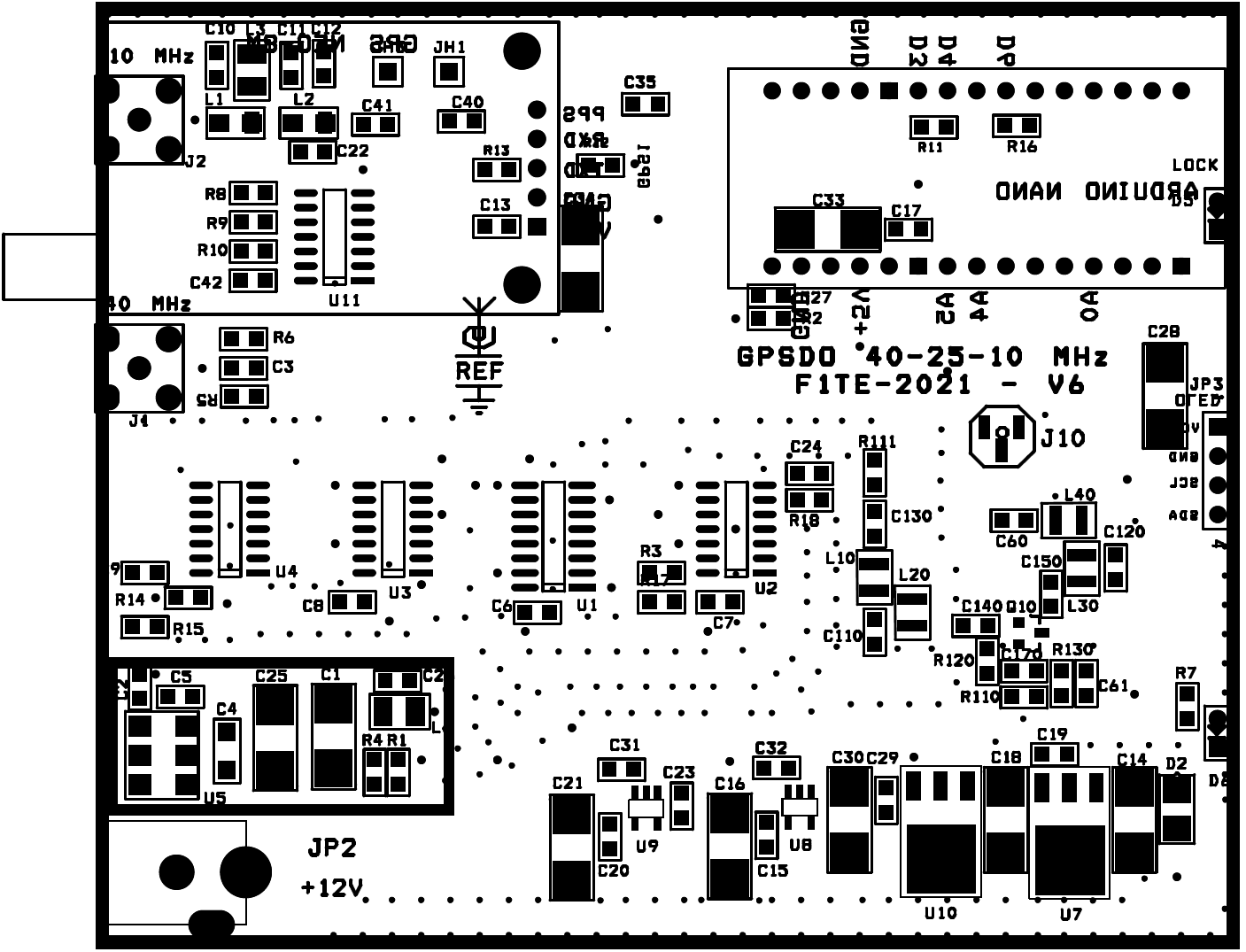
Implantation
Les PCB correspondants sont en cours de fabrication pour la validation finale dans les conditions de production en série.
A suivre.