Inclinomètre digital
F1TE-F1HDI-F1OAT-F5DJL
L’objectif de cet inclinomètre est de déterminer l’inclinaison (site) avec une précision de l’ordre de 0.1deg. Ceci afin de permettre le positionnement d’un ensemble d’aériens EME, satellite ou hyperfréquence avec une bonne précision et reproductibilité.
Le “cœur” de cet inclinomètre est un accéléromètre 2 axes Memsic 2125G, le cerveau un microprocesseur Microchip PIC 16F690 qui réalise les fonctions suivantes : acquisition des signaux (Impulsion en provenance de l’accéléromètre), le traitement mathématique afin de calculer l’inclinaison, et la transmission via RS232/RS485 des valeurs transmises.
En complément le microprocesseur peut aussi traiter les informations en provenance d’un potentiomètre (affichage de l’azimut d ‘ un rotor classique)
Synoptique de l'inclinomètre :
Mode de fonctionnement:
Le capteur transmet par liaison RS485 sous forme de trames l’ensemble des informations :
Format de la trame envoyée par le capteur :
Format des données : 9600bauds Start bit : 1 bit, Data bit: 8 Bits ,Stop bit: 1 bit, Pas de parité
Format de la trame :
| Output format | |||
| RS485 | |||
| 9600,N,8,1 | |||
| Frame : <0xA5><ELH><ELL><AZH><AZL><0x13 | |||
Le PIC 16F690 dispose de canaux analogiques, ce qui permet donc de contrôler une recopie d'azimut par potentiomètre.
Ce potentiomètre peut être placé sur le connecteur ISP JP3 entre VCC, RA0 et GND.
La valeur mesurée sera transformée en degrés, de 0 à 360 pour 5 Volts de variation.
Cette valeur d'azimut est transmise en série dans la trame précédemment décrite.
Le contrôleur ensuite, exploite ou non cette donnée, le champ n'ayant pas de signification si le potentiomètre n'est pas connecté..
Les informations de site et d’azimut sont transmises de façon continue soit vers une carte d’affichage, ou de contrôle des moteur (tracking), voire même à un PC.
La cadence des informations dépend du nombre de mesures dont on effecue la moyenne pour obtenir des valeurs stables.
Ce nombre de mesure est programmable dans la zone l'EEPROM du PIC.
Principe de la mesure :
Cet inclinomètre utilise un circuit double accéléromètre de la société MEMSIC ; ce circuit est capable de mesurer des accélérations variables (vibrations par exemples) ou des accélérations constantes. Une accélération constante particulière est la force de gravite terrestre.
Cette méthode sera utilisée dans la mesure de l’angle, en effet l’angle entre la force de gravite (verticale) et l’axe de mesure du capteur est l’inclinaison
Le capteur est une petite cavité dans la quelle sont places un élément chauffant et un ensemble de capteurs de température, sous l’effet de la gravite ou d’une accélération l’équilibre thermique de l’ensemble est modifié et c’est cette variation qui est rendue disponible sous forme d’une tension ou d’une variation de rapport cyclique d’un signal de fréquence 100Hz.
Dans cette réalisation nous utiliserons un MXD2125G qui comprend dans le meme boitier deux accéléromètres (placés perpendiculairement) et qui délivrent un signal de rapport cyclique variable en fonction de l’accélération mesuré sur chaque axe.
Le rapport cyclique de chacun des accéléromètres sera mesuré avec précision par le micro contrôleur (acquisition et filtrage du bruit) et ensuite traité mathématiquement pour calculer l’angle. Cette valeur sera ensuite transmise sous forme d’ une trame décrite ci-dessus via la liaison RS485.
L’utilisation de la liaison RS485 permet de transmettre de façon fiable sur plusieurs dizaines, voire centaines de mètres avec une bonne immunité aux perturbations extérieures.
Traitement mathématique :
La relation entre la grandeur fournie par l’accéléromètre (tension ou rapport cyclique
Ax :=g* sin(alpha)
On notera que pour des angles supérieur a 60 une variation d’angle importante produira une variation de plus faible de la grandeur fournie que pour des valeur d’inclinaison plus faible.
Afin d’obtenir une bonne précision sur 360 degrés nous utilisons les deux accéléromètres montés suivant des axes perpendiculaires.
Dans ces conditions
Ax= g* sin (alpha)
Ay= g* sin (beta)
Mais alpha+beta = 90 degres
Ax= g* sin (-beta+90) = g* cos(beta)
Ay/Ax = g sin(beta)/ g cos (beta)
L’inclinaison peut donc être exprimée par beta = arc tan (Ay/Ax)
Schéma du capteur :
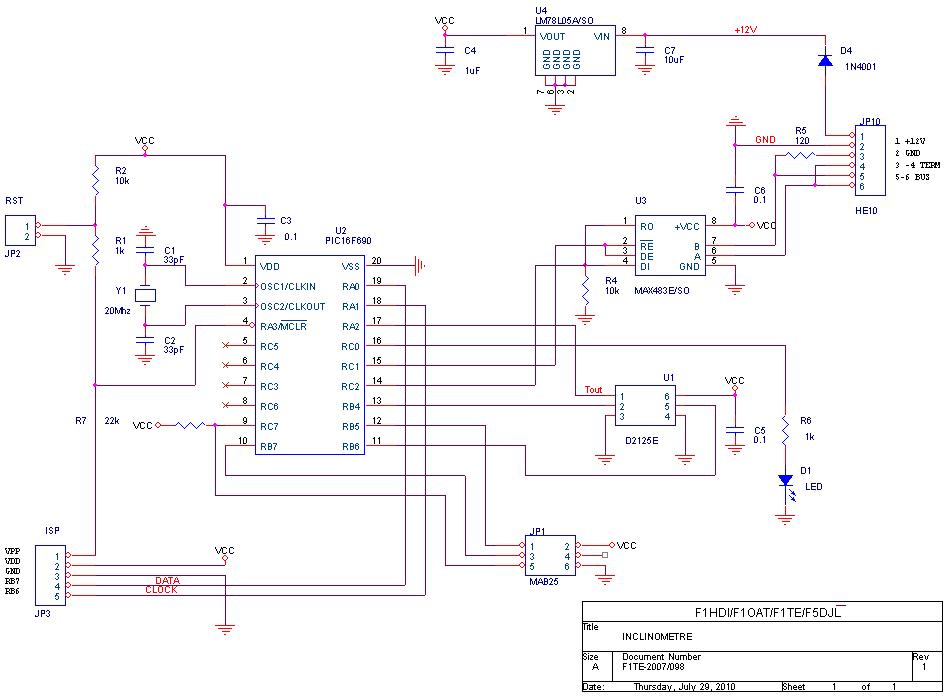
Version avec support CODEUR 12 bits MAB25
Liste des composants
Item Quantité Désignation
________________________________________
1 2 C1, C2 33pF
2 3 C3, C5, C6 0.1µF
3 1 C4 1uF
4 1 C7 10uF
5 1 D1 LED
6 1 D2 LM4120AIM5-1.8
7 1 D3 1N4148
8 1 D4 1N4001
9 1 JP1 HE10 4X2
10 1 JP2 HE14 Male 2
11 1 JP3 HE14 Male 6
12 1 JP4 HE14 Male 2
13 1 JP10 HE14 Male 6
14 2 R1, R6 1k
15 2 R2, R4 10k
16 2 R3, R7 22k
17 1 R5 120
18 1 U1 D2125E
19 1 U2 PIC16F690
20 1 U3 MAX483E/SO
21 1 U4 LM78L05A/SO
22 1 U5 MXD2125
23 1 Y1 20Mhz
Implantation
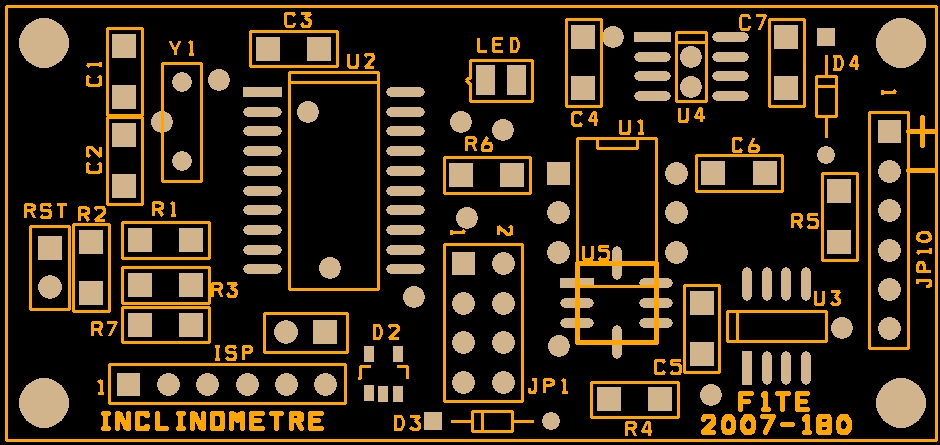
Le circuit imprimé mesure 55x28mm.
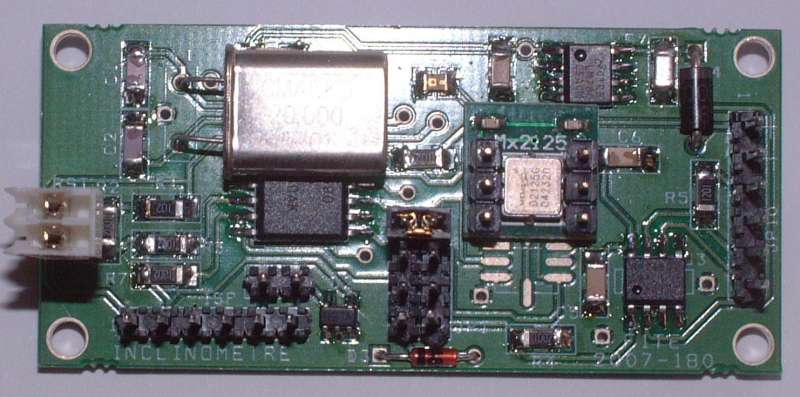
Vous remarquerez sur cette version la double implantation U1/U5 qui permet de monter soit directement le chip MXD2125, soit le circuit DIL de chez Parallax.
http://www.parallax.com/ Item code 28017
Le connecteur JP1 sert pour une procédure de calibration du capteur qui sera développée ultérieurement. La position par défaut est la position 1-2 comme montré sur la photo.
La connexion du capteur est réalisée par un câble blindé deux paires torsadées.
Le câble téléphonique standard avec écran peut convenir.
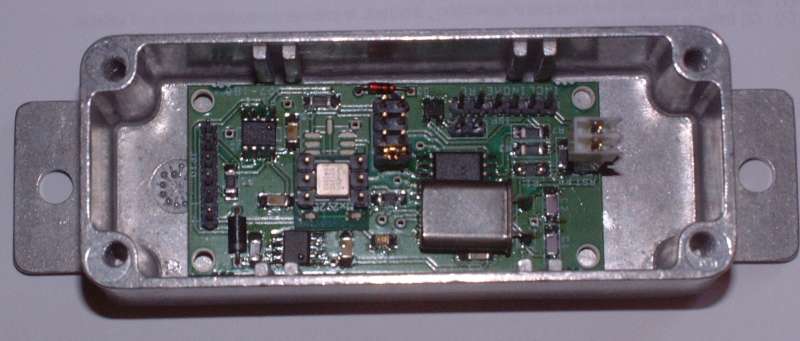
Les signaux retransmis sur la ligne RS485 de communication sont exploités par un contrôleur d’affichage dont vous voyez ci-dessous un prototype.
Vous trouverez sur les autres pages une description d’un contrôleur avec recopie d'azimut par potentiomètre ainsi qu'une autre pour moteur d’azimut RAK incluant l’affichage de l’élévation fournie par ce capteur.
