Contrôle global de position d'antenne
Jean-Louis TRUQUET, F5DJL
Lucien SERRANO, F1TE
1.Préambule
Voici bientôt 10 ans, nous développions avec un groupe d'OM un capteur inclinomètre numérique utilisant un accéléromètre pour pouvoir déterminer la position d'une antenne en élévation. Les critères étaient les suivants :
- précision inférieure au degré ;
- plus de couplage mécanique en rotation ;
- transmission de l'information sous une forme numérique ;
- ligne de communication de longueur quelconque ;
- adaptation aisée sur n'importe quel type d'antenne.
Le “cœur” de cet inclinomètre était un accéléromètre 2 axes Memsic 2125G, le cerveau un microprocesseur Microchip PIC 16F690 qui réalise les fonctions suivantes : acquisition des signaux (Impulsion en provenance de l’accéléromètre), le traitement mathématique afin de calculer l’inclinaison.
A ce capteur d'élévation a été rajoutée une mesure de l'azimut soit par un capteur magnétique MEGATRON MAB25, soit par une mesure analogique par potentiomètre.
La transmission de ces informations se faisait via une ligne asynchrone en RS485.
C'était avant l'apparition des "Smartphones". Ces appareils sont maintenant équipés de ces capteurs ce qui a eu pour conséquence de faire chuter les prix de ces composants à quelques Euros. D'autre part, il s'est développé autour des plateformes robotiques de type Arduino de nombreux modules accessoires connectables sur bus I2C dont nous pourrons tirer profit pour des fonctionnalités en relation directe avec notre activité radio.
Le circuit imprimé de ce premier développement ayant été diffusé à une centaine d'exemplaires, preuve de l'intérêt du système dans le microcosme radioamateur, nous avons décidé de refaire un autre capteur utilisant les nouveaux composants, élargissant les possibilités de mesure et proposant une solution globale de pilotage des aériens.
Les critères sont toujours les mêmes mais l'utilisation de nouveaux composants permet de faire chuter le prix de revient.
Le premier capteur ne faisait que la transmission des informations de position en site et azimut. Le nouveau projet reprend et complète les principes en les modernisant.
2. La carte principale multifonction.
Dans notre nouveau développement, l'ensemble du projet se compose de deux modules principaux, un module capteurs et un module d'affichage et de commande. Le même circuit imprimé et le même microcontrôleur sont utilisés pour les deux modules. Mais bien sûr équipé d'un programme interne différent.
Cette carte comporte les fonctions de base pour le calcul et la collecte de l'information. Le système fait largement appel à des modules que l'on trouve sur les marchés asiatiques et qui sont développés pour la robotique pour la capture d'informations diverses ou la communication.
Le module "capteur", en plus de sa possibilité d'affichage optionnel, pourra recevoir un GPS pour déterminer la position de la station ainsi que l'heure précise. Il est possible aussi de raccorder des modules additionnels comme des capteurs de pression atmosphérique, de température ou une girouette anémomètre, constituant ainsi une mini station météo.
Tous ces modules additionnels, développés pour la robotique, sont maintenant disponibles pour quelques Euros seulement.
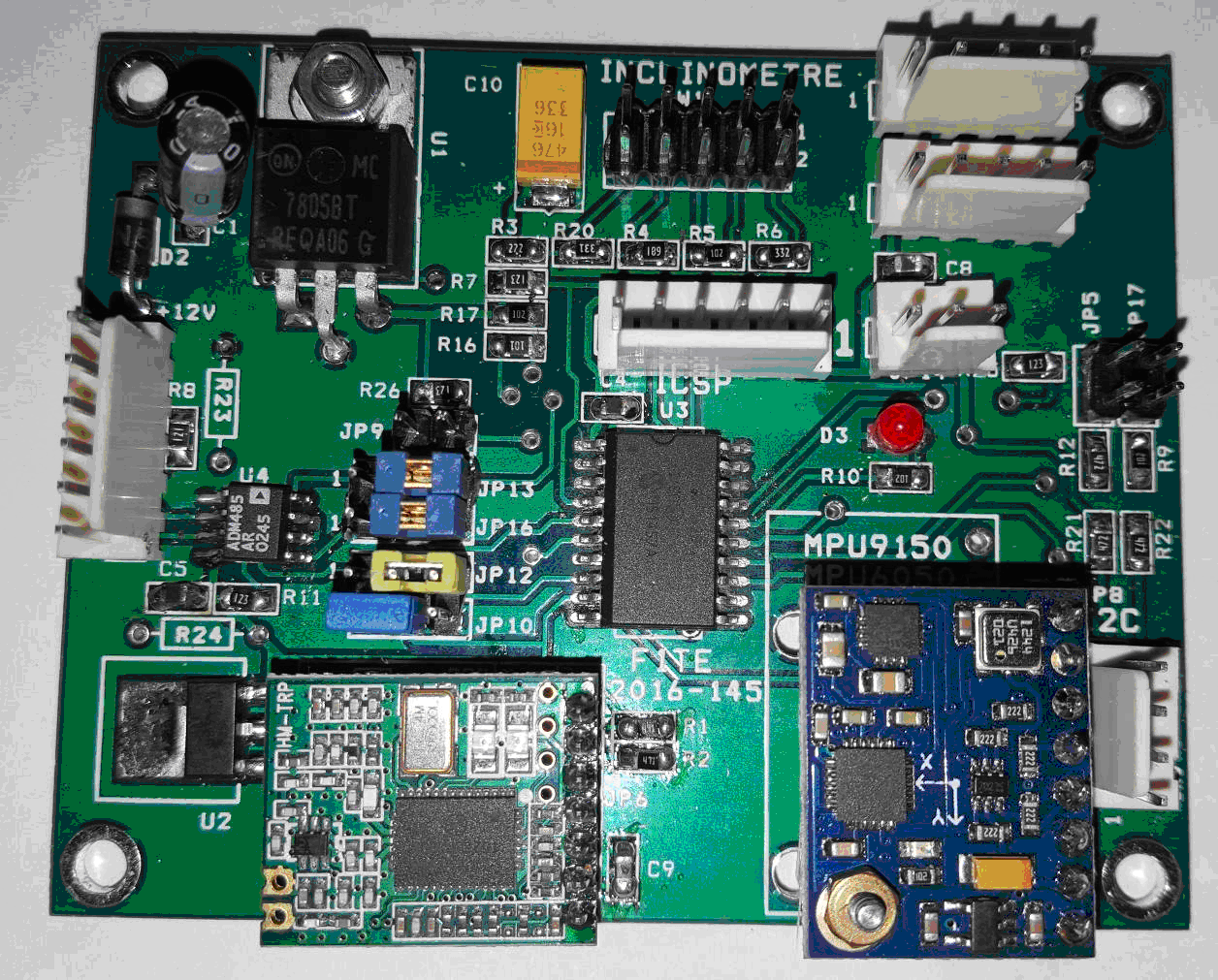
Figure 1- Aspect général de la carte CPU-capteur
La carte est réalisée sur un circuit imprimé double-face, trous métallisés, vernis épargne et sérigraphie d'une dimension de 58x73 mm. Les composants sont principalement des composants à montage de surface pour un gain de place.
2.1 Le schéma de base
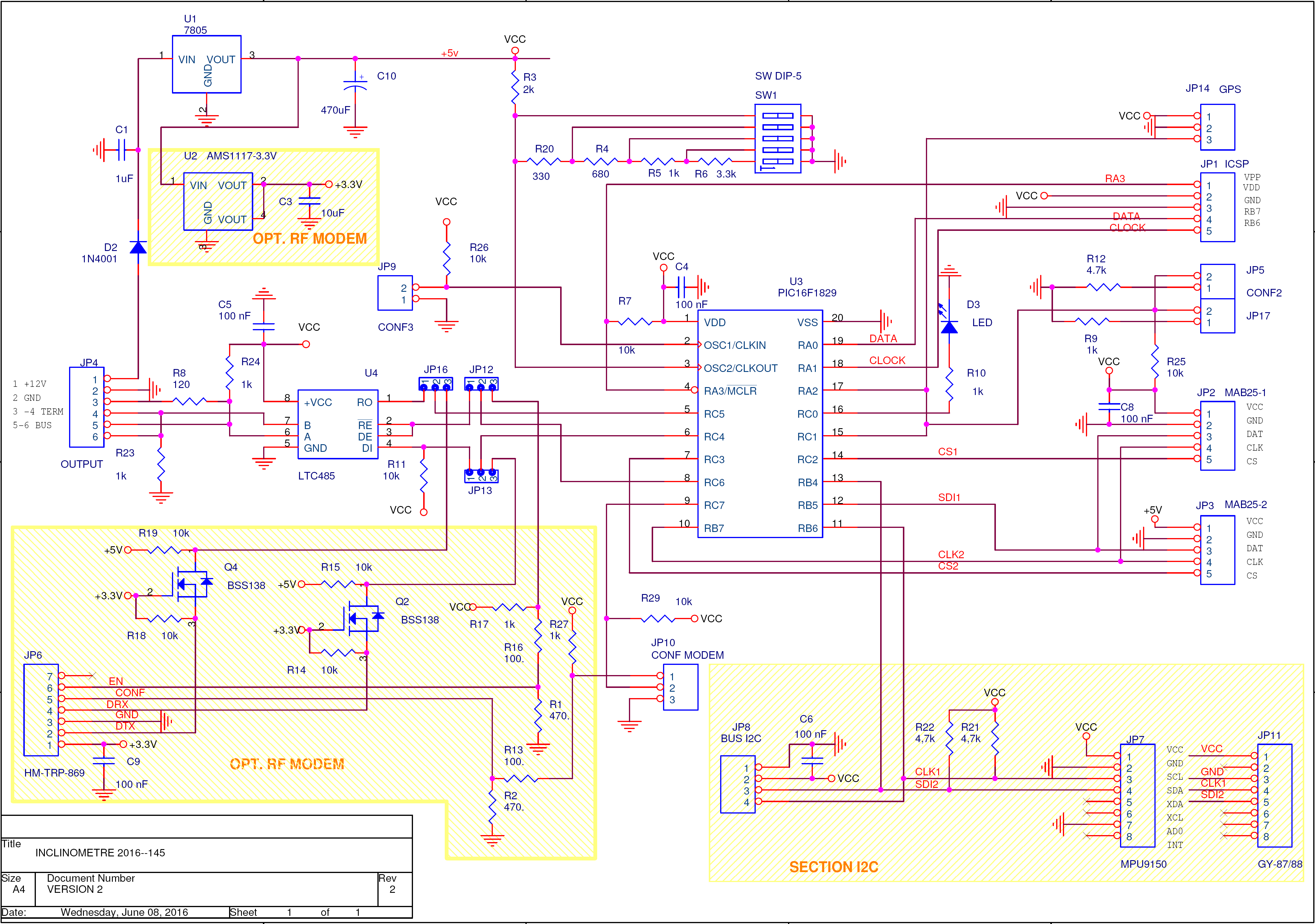
Figure 2 - Schéma de base
Pour "le fun", nous avons implanté, en option, un petit modem RF semi-duplex qui peut se substituer à la liaison filaire RS485. Si l'option modem RF HM-TRP869 n'est pas utilisée, les composants associés ne sont pas à monter : R1, 2, 13, 14, 15, 16, 17, 18,19, 27 Q2 et Q4, U2, C3 et C9.
JP12, 13 et 16, qui servent à diriger les signaux de communications de l'UART soit vers le modem RF, soit vers le driver de bus RS485, sont alors à positionner entre 1 et 2.
Les résistances traversantes R23 et R24 ne sont à monter que sur le module afficheur-commandes.
2.2 Bus I2C
I2C (signifie : Inter-Integrated Circuit, en anglais) est un bus informatique qui a émergé de la « guerre des standards » lancée par les acteurs du monde électronique. Conçu par Philips pour les applications de domotique et d’électronique domestique, il permet de relier facilement un microprocesseur à différents circuits.
Il existe d’innombrables périphériques exploitant ce bus, il est même implémentable par logiciel dans n’importe quel microcontrôleur. (Wikipedia)
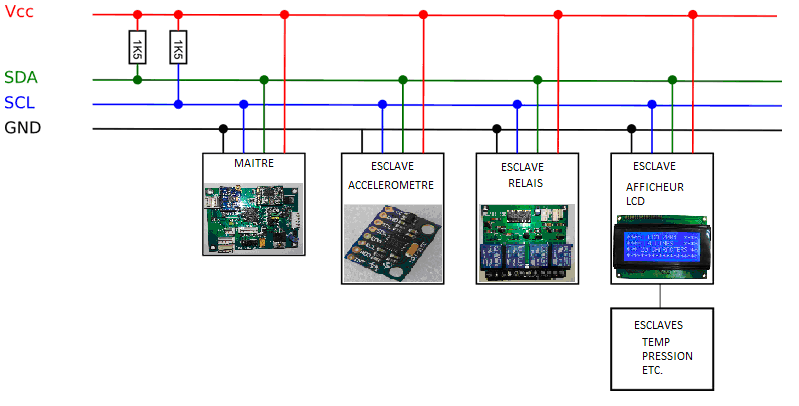
Figure 3 - Principe du bus I2C
Nous avons largement utilisé ce bus pour raccorder les différents éléments.
Ce bus est un bus local, interne à un sous-ensemble - capteur ou afficheur - pour échanger les données entre le microcontrôleur et les différents capteurs adressables.
A ne pas confondre avec le bus RS485 qui est le bus de communication externe entre le module capteurs et le module d'affichage-commandes.
Il utilise 4 fils, deux pour l'alimentation des périphériques et deux pour l'échange des données. Tous les éléments périphériques sont connectés en parallèle sur ce bus et répondent à des adresses différentes.
2.3 Bus RS485
Ce bus de terrain est utilisé pour la communication entre le module capteur et le module de commande et d'affichage. Les données transitent en semi-duplex sur une ligne bifilaire torsadée de type téléphonique qui peut atteindre mille mètres. Pour éviter des tensions en mode commun pouvant endommager les composants, il est conseillé d'assurer la continuité de la masse entre les deux équipements par l'utilisation d'un câble blindé.
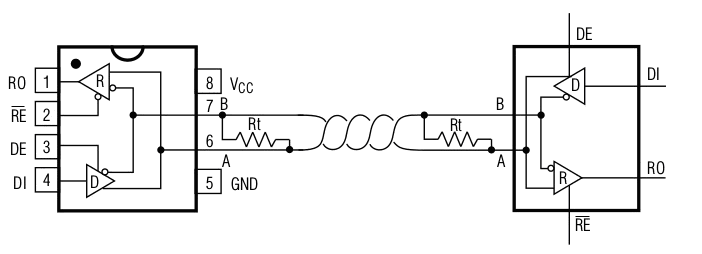
Figure 4 - RS485 en mode semi-duplex
Le mode semi-duplex implique la gestion du retournement de la ligne pour gérer le sens de la communication, de la transmission des informations du module capteur vers le module d'affichage ou des instructions du module de commande vers le module capteur et ses périphériques. Dans le schéma ci dessus, ce sont les signaux DE et RE du chip driver de communication qui servent au microprocesseur pour ce retournement du sens de communication.
2.4 MODEM RF
Nous avons sélectionné un petit module HM-TRP868S de la société HOPERF que l'on trouve sur les marchés asiatiques pour moins de 10 Euros. Ce modem semi-duplex se substitue à la liaison RS485 filaire, les trois signaux, données à transmettre et ligne de commande du retournement, sont simplement basculés ver le modem.
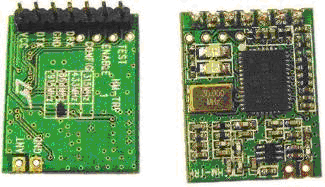
Figure 5 - Modem RF HM-TRP868S
La fréquence est dans la bande dite ISM des 868 MHz, donc hors bandes amateur. Lors d'essais, une communication jusqu'à environ 100 mètres, sans visibilité directe, a été réalisée sans problème avec de simples bouts de fils 1/4 d'onde comme antenne de part et d'autre. Mais il est important de préciser que des problèmes de compatibilité électromagnétique peuvent se présenter, tant en rayonnement qu'en susceptibilité, dans un environnement RF radioamateur. La voie de communication filaire par le bus RS485, dans ce cas, peut être préférable.
2.5 Implantation des composants
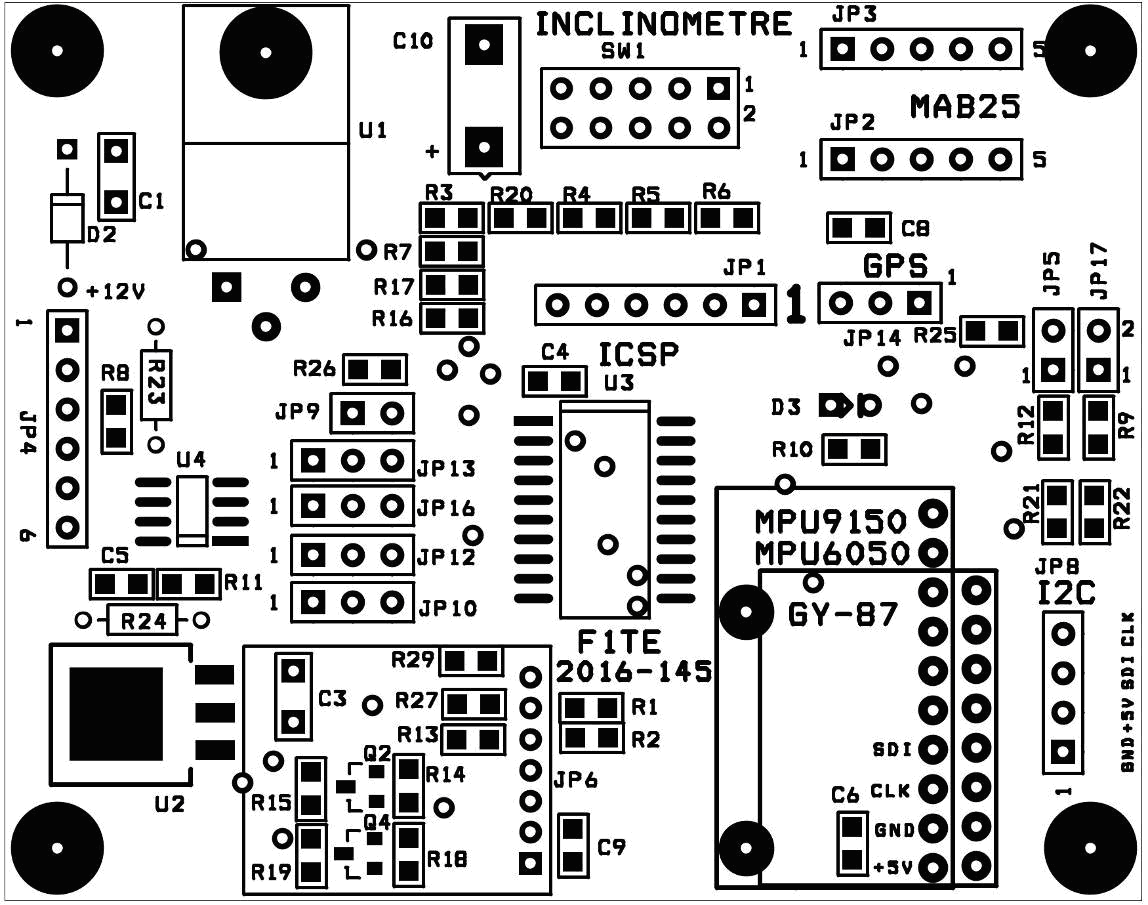
Figure 6 - Implantation des composants
2.6 Liste des composants
|
Item |
Quantité |
Référence |
Valeur |
|
1 |
1 |
C1 |
1uF 25V CMS1206 ou radial |
|
2 |
1 |
C3 |
10uF CMS1206 |
|
3 |
5 |
C4,C5,C6,C8,C9 |
100 nF CMS0805 |
|
4 |
1 |
C10 |
470uF 10V CMS7343 ou radial |
|
5 |
1 |
D2 |
1N4001 |
|
6 |
1 |
D3 |
LED |
|
7 |
1 |
JP1, JP4 |
KF2510-6 connecteur 2.54 mm 6 pin |
|
8 |
2 |
JP2, JP3 |
KF2510-5 connecteur 2.54 mm 5 pin |
|
9 |
3 |
JP5, JP9, JP17 |
Barrette sécable 2,54 mm 2 pin |
|
10 |
1 |
JP6 |
Connecteur 7 broches, 2mm pour modem RF HM-TRP-869 |
|
11 |
1 |
JP7 |
Connecteur 2,54 mm pour module accéléromètre MPU9150 |
|
12 |
1 |
JP8 |
KF2510-4 connecteur 2.54 mm 4 pin |
|
13 |
1 |
JP11 |
OPTION accéléromètre GY-87/88 |
|
14 |
4 |
JP10,JP12,JP13,JP16 |
Barrette sécable 2,54 mm 3 pin |
|
15 |
1 |
JP14 |
KF2510-3 connecteur 2.54 mm 3 pin |
|
16 |
2 |
Q4,Q2 |
BSS138 SOT23 |
|
17 |
2 |
R2,R1 |
470.Ω CMS0805 |
|
18 |
1 |
R3 |
2kΩ CMS0805 |
|
19 |
1 |
R4 |
680.Ω CMS0805 |
|
20 |
5 |
R5,R9,R10,R17,R27 |
1kΩ CMS0805 |
|
21 |
2 |
R23,R24 |
1kΩ traversantes 1/8 W |
|
22 |
1 |
R6 |
3.3kΩ CMS0805 |
|
23 |
8 |
R7,R11,R14,R15,R18,R19,R25,R26,R29 |
10kΩ CMS0805 |
|
24 |
1 |
R8 |
120.Ω CMS0805 |
|
25 |
1 |
R12 |
4.7kΩ CMS0805 |
|
26 |
2 |
R13,R16 |
100.Ω CMS0805 |
|
27 |
1 |
R20 |
330.Ω CMS0805 |
|
28 |
2 |
R21,R22 |
4,7kΩ CMS0805 |
|
29 |
1 |
SW1 |
Barrette sécable 2,54 mm 2X5 |
|
30 |
1 |
U1 |
LM7805 TO220 |
|
31 |
1 |
U2 |
AMS1117-3.3V |
|
32 |
1 |
U3 |
PIC16F1829 / SO |
|
33 |
1 |
U4 |
LTC485 /SO |
3. Synoptique du module capteurs
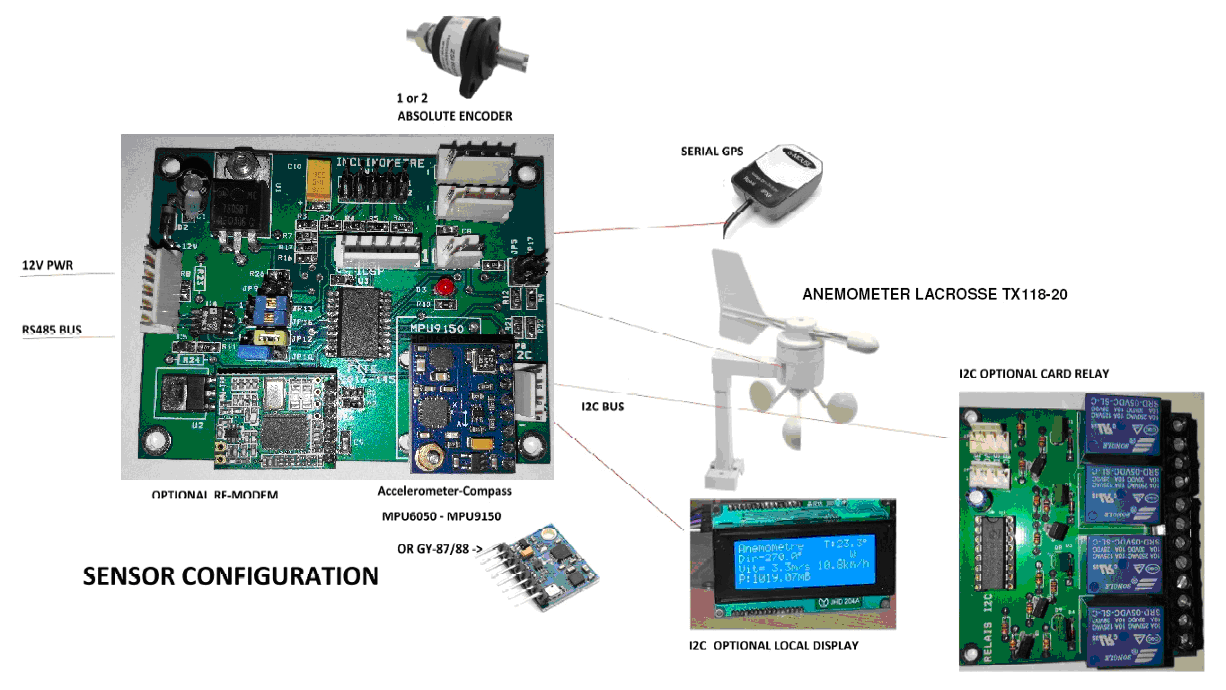
Figure 7 - Synoptique de la configuration "capteurs"
3.1 La carte principale "capteur"
Elle est conforme à la description du paragraphe précédent.
Les résistances traversantes R23 et R24 ne sont pas montées.
Les straps JP12, 13 et 16 permettent de basculer les signaux de communication asynchrone de l'UART vers l'adaptateur RS485 ou vers le modem RF en fonction de l'option choisie pour la communication avec le module affichage-commande.
Le code du firmware sera spécifique à ce module. Il est disponible en téléchargement sur le site web indiqué en annexe.
3.2 Les capteurs de position.
Le module capteur supporte jusqu'à deux codeurs absolus de type MEGATRON MAB25, 12 ou 14 bits, en mode SPI (Serial Peripheral Interface).
C'est la configuration pour un codeur MAB25 en azimut et un autre en élévation.
Si la mesure de l'élévation est confiée à un accéléromètre, c'est le type MPU9150 ou mieux GY-87 qui est choisi, le chip déjà monté sur un petit circuit imprimé. Ce composant a l'avantage, en plus de la mesure de l'inclinaison, de posséder un magnétomètre capable de mesurer un azimut magnétique. Même si la précision de cette information d'azimut n'est pas aussi grande que celle fournie par un codeur absolu couplé à la rotation de l'antenne, dans certains cas elle sera suffisante.
3.3 L'accéléromètre.
Le modèle retenu est conçu par la société InvenSense©. Il s'agit du MPU-6050 ou MPU-9150 entièrement compatibles.
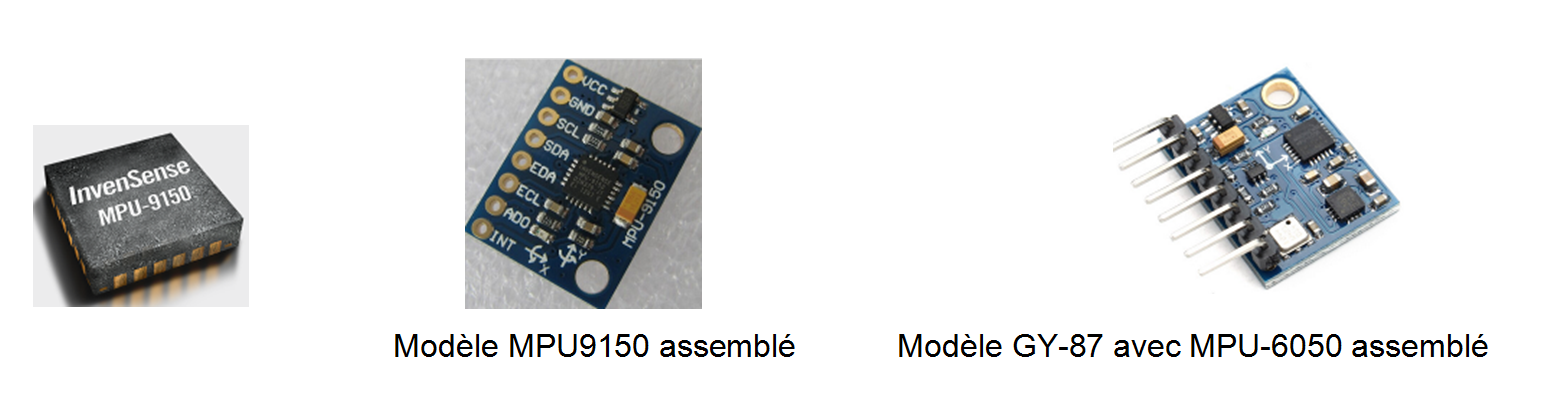
Figure 8 - Capteurs Accéléromètres
On peut trouver ce chip nu ou déjà assemblé sur un petit circuit imprimé développé pour des applications de robotique.
Compte tenu de la difficulté de montage de ce composant, c'est la version sur circuit imprimé qui a été retenue, la différence de prix n'étant pas significative.
En fonction du modèle vous trouverez monté soit un chip MPU6050, soit un chip MPU9150. Sur le modèle commercial GY-87, c'est un MPU6050 qui est monté avec un capteur de pression et de température ainsi qu'un chip magnétomètre.
3.4 Les encodeurs magnétiques.
Le choix s'est porté sur les produits de la société MEGATRON qui développe des codeurs de 12 ou 14 bits de résolution. Prix indicatif de départ autour de 30 €.
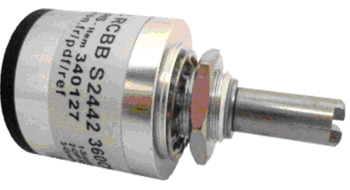
Figure 9 - Codeur magnétique MEGATRON 22x RCBB
En particulier le modèle 22x RCBB qui présente l'avantage d'être en boîtier aluminium avec axe sur roulement à billes. Le dialogue utilisé est le protocole au standard SPI, Serial Peripheral Interface.
3.5 Les options
3.5.1 Capteurs de pression et température
Sur le circuit imprimé capteur GY87 dont nous avons parlé sont implantés trois composants :
Un accéléromètre MPU-6050 permettant de mesurer l'inclinaison, un magnétomètre qui nous permet de mesurer l'azimut magnétique, et un capteur de pression et température. Les routines softwares associées permettront de mesurer ces différentes données physiques.
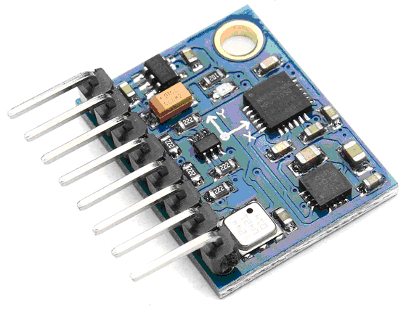
Figure 10 - Module accéléromètre, magnétomètre et capteur de pression
Cette option permet de disposer d'une information de la pression atmosphérique locale (QFE), c'est à dire non ramenée au niveau de la mer (QNH). Les différents capteurs de cette carte GY-87 sont raccordé en interne en bus I2C et répondent sur des adresses différentes.
3.5.2 L'anémomètre
Cette option permet de délivrer une information sur l'orientation du vent ainsi que sa vitesse. Le modèle choisi est le TX118-20 de LA CROSSE TECHNOLOGY que l'on trouve en pièce de rechange de station météo pour moins de 40 €.
Cet équipement délivre une trame de 41 bits toutes les deux secondes environ comportant de façon redondante ces deux données qui sont exploitées par le microcontrôleur de la carte capteur.

Figure 11 - Anémomètre-girouette Figure 12 - Raccordement anémomètre
Le capteur est alimenté en 5 volts DC. Le TX20 transmet les données toutes les deux secondes quand la broche DTR (Pin 3, Vert) passe au niveau logique bas.
Le raccordement sur la carte capteurs se fait par le connecteur JP1 qui sert normalement à la programmation du PIC. L'adaptation des signaux nécessite un transistor inverseur de polarité pour le signal TxD.
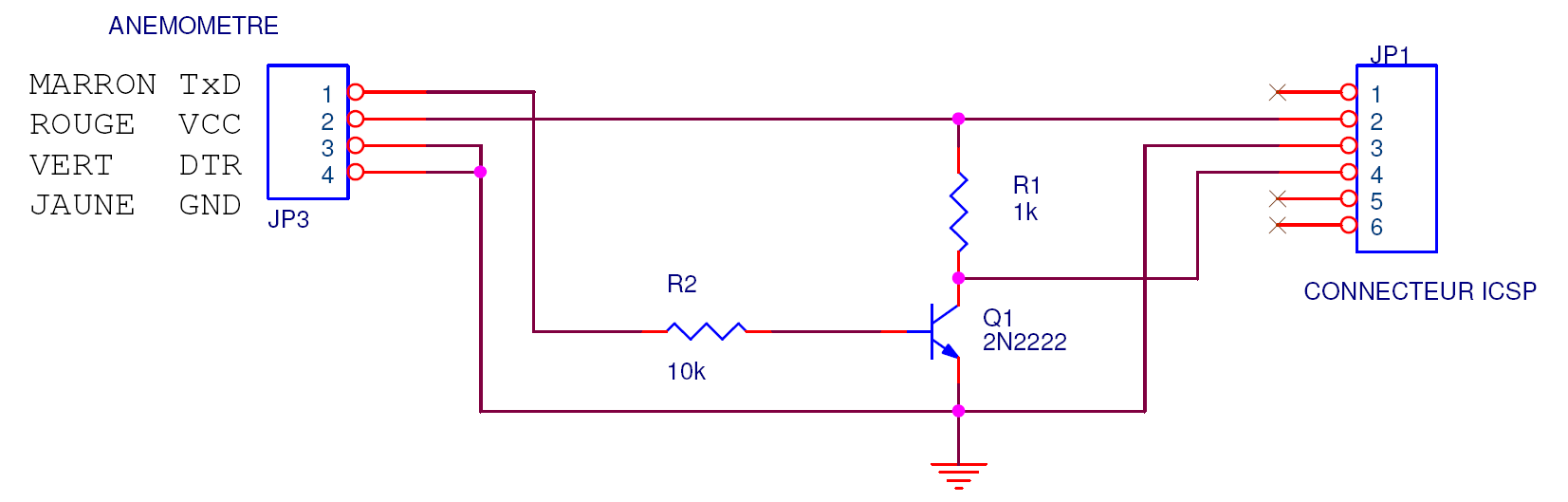
Figure 13 - Raccordement de l'anémomètre sur le connecteur JP1 ICSP
3.5.3 Mesure analogique
Il est apparu utile que le capteur, situé dans les aériens puisse retourner dans son flot d'informations une mesure analogique en provenance d'un coupleur directif ou autre sonde de mesure de la puissance relative envoyée aux aériens.
L'entrée située sur le connecteur repéré GPS peut être utilisée à cet effet dans une plage de mesure entre 0 et 2V. L'information sera indiquée sur le module d'affichage par un bargraphe.
3.5.4 L'afficheur
C'est un afficheur LCD 4 fois 20 caractères rétro-éclairé muni d'un adaptateur I2C.
Cette fonction d'affichage est optionnelle dans le cas du module capteur placé dans les antennes, mais il peut être utile de pouvoir le raccorder provisoirement pendant la période d'installation du module.
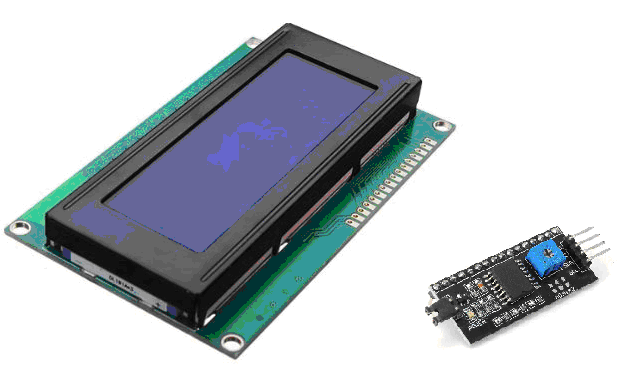
Figure 14 - Afficheur LCD 4x20 et son adaptateur I2C
3.5.5 Le GPS
Cette option permet de fournir un certain nombre d'informations utiles comme la position déterminant le QRA-locator, l'heure et la déclinaison magnétique.

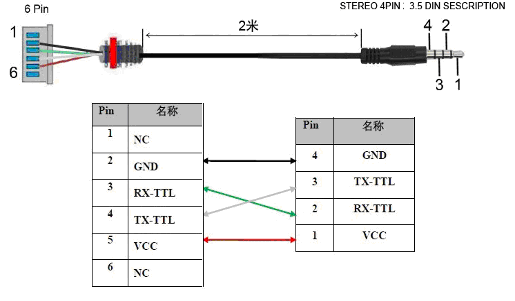
Figure 15 - GPS VK-163 Figure 16 - Raccordement du GPS
Nous avons choisi un modèle commercialisé sous la référence VK-163 que l'on trouve pour environ 15 Euros.
Les informations de connexion sont indiquées ci-dessus.
3.5.6 La carte relais
Cette carte est développée spécialement pour commander des moteurs ou des accessoires à distance. Elle se compose de quatre relais, bobine 5V et contacts 10 A.
C'est un chip PCF8574AP en boitier DIP qui assure le décodage et le dialogue sur le bus I2C pour sélecter le relais à coller. La carte est alimentée en totalité par la tension de 5V disponible sur le bus I2C.
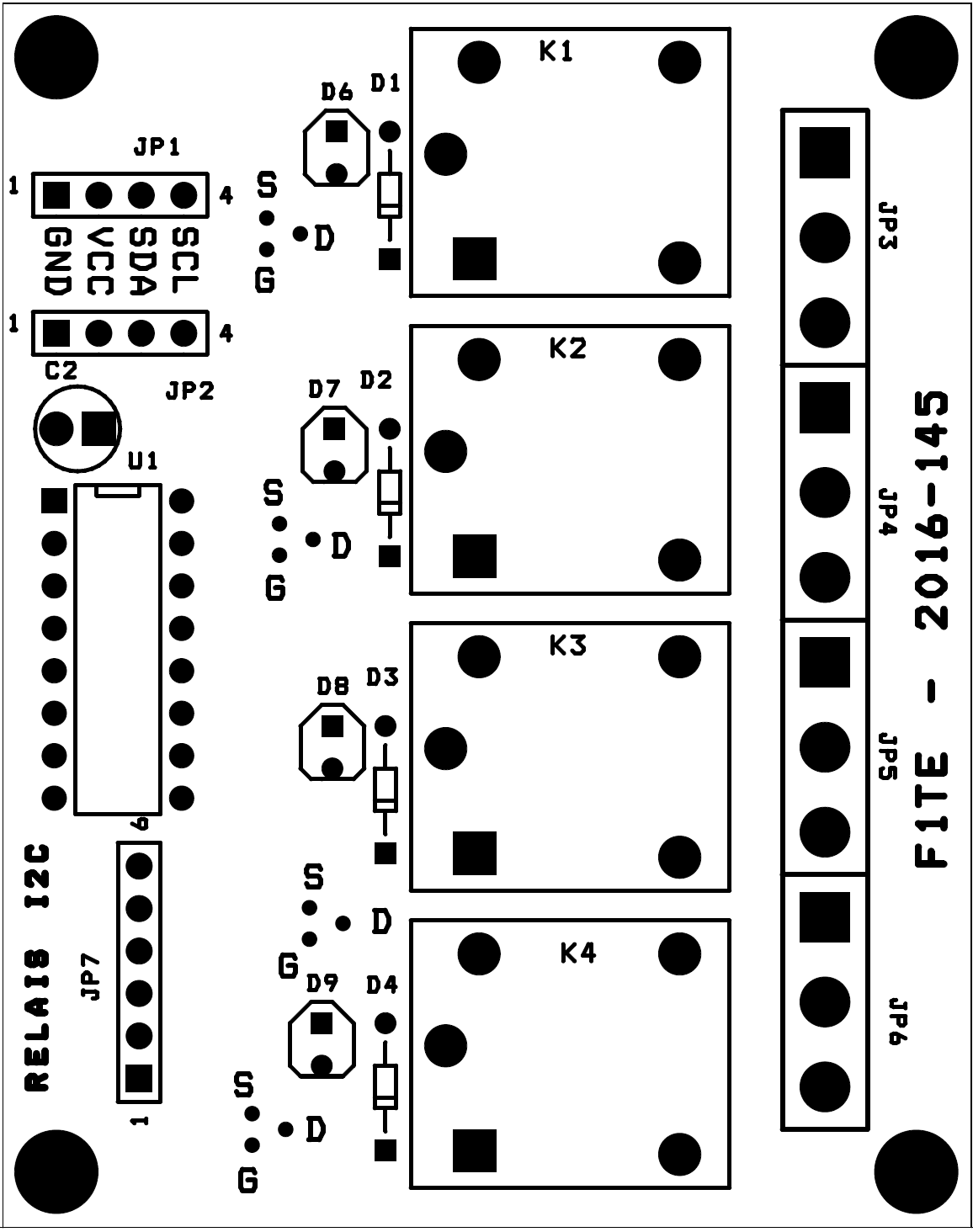
Figure 17 - Implantation des composants de la carte relais
3.5.6.1 Le schéma
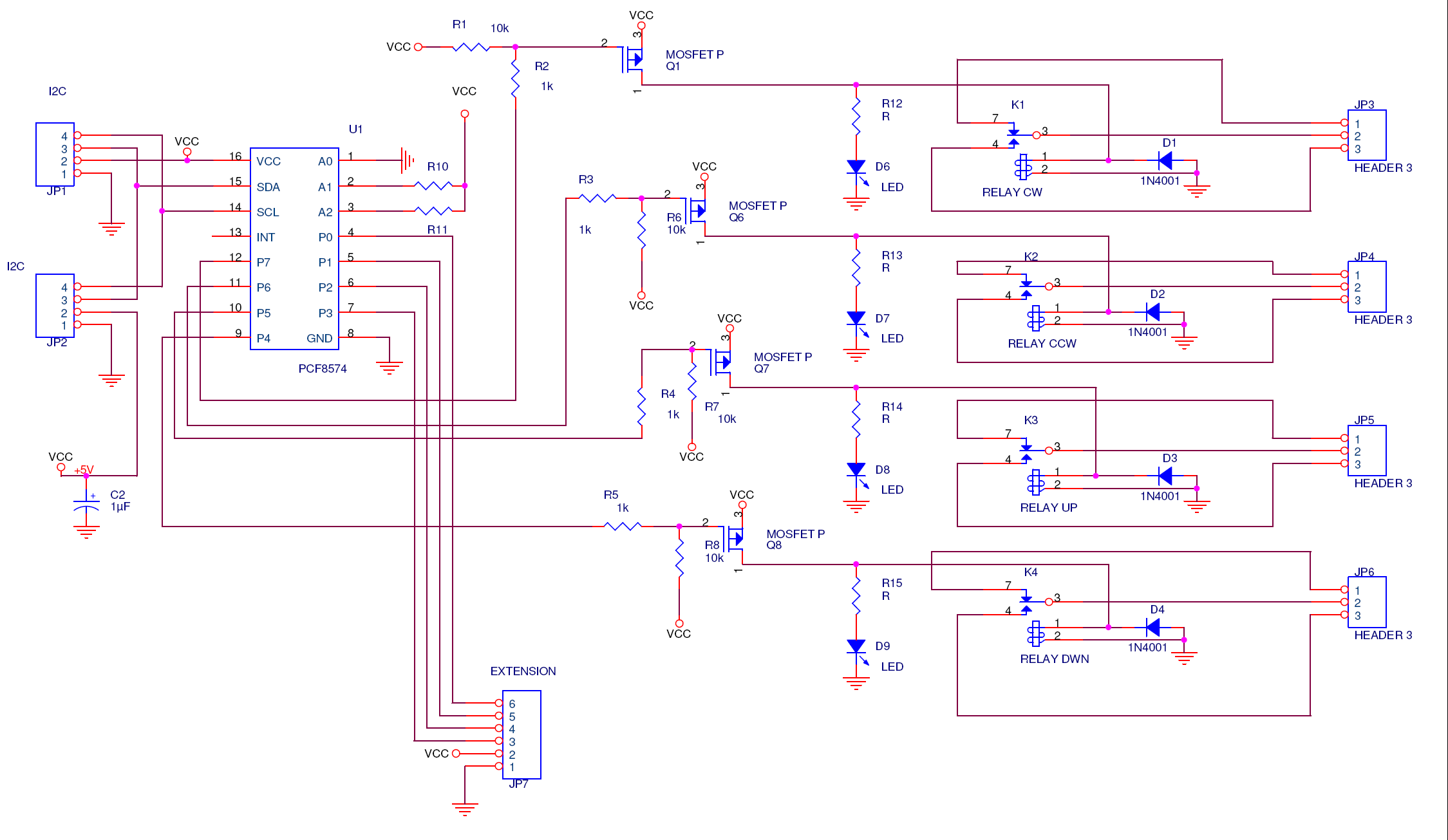
Figure 18 - Schéma de la carte relais
3.5.6.2 Connexions des moteurs d'antennes
Ci-dessous vous trouverez deux exemples de câblage des relais en fonction du type de moteur, 24 volts alternatif ou tension continue.
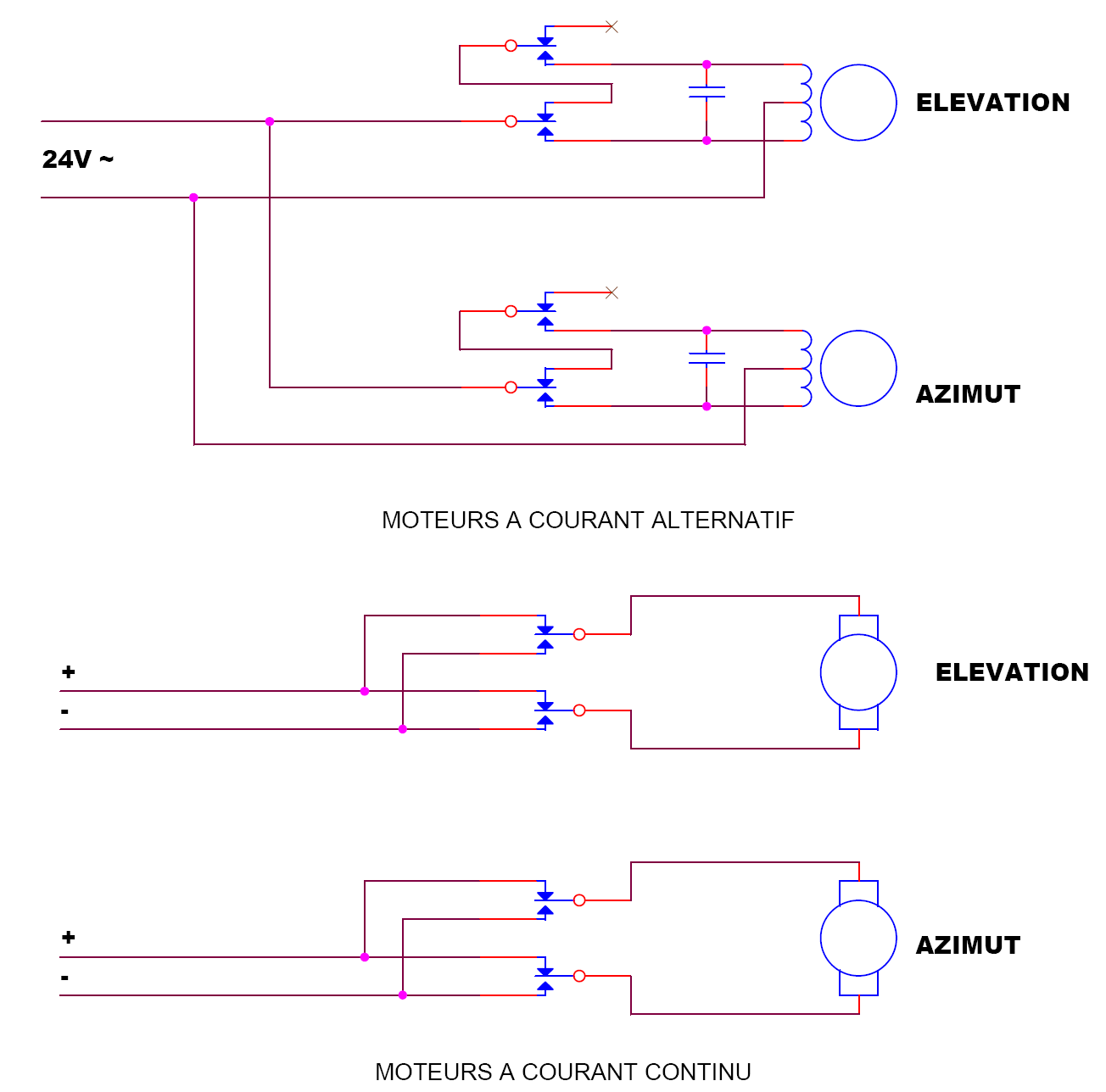
Figure 19 - Cablage des moteurs
3.5.6.3 Les composants
La carte relais est adressable sur le bus I2C et doit avoir impérativement le bit A0 à zéro et les deux autres bits d'adresse A1 et A2 au un logique, soit VCC.
|
Item |
Quantité |
Référence |
Valeur |
|
1 |
1 |
C2 |
1µF 16V radial |
|
2 |
4 |
D1,D2,D3,D4 |
1N4001 |
|
3 |
4 |
D6,D7,D8,D9 |
LED |
|
4 |
2 |
JP2,JP1 |
I2C - KF2510-4 connecteur 2.54 mm 4 pin |
|
5 |
4 |
JP3,JP4,JP5,JP6 |
BORNIER à VIS au pas de 5,08 mm |
|
6 |
1 |
JP7 |
KF2510-6 connecteur 2.54 mm 6 pin |
|
7 |
4 |
K1, K2, K3, K4 |
RELAIS / SRD - 05VDC - SL - C |
|
8 |
4 |
Q1,Q6,Q7,Q8 |
MOSFET P - TO92 : ZVP2106 ou CMS : IRLML6402 SOT-23 |
|
9 |
6 |
R1,R6,R7,R8, R10,R11 |
10kΩ CMS 0805 |
|
10 |
8 |
R2,R3,R4,R5,R12,R13,R14,R15 |
1kΩ CMS 0805 |
|
11 |
1 |
U1 |
PCF8574AP boitier DIL, modèle "A" impératif |
4. Le module affichage et de commande
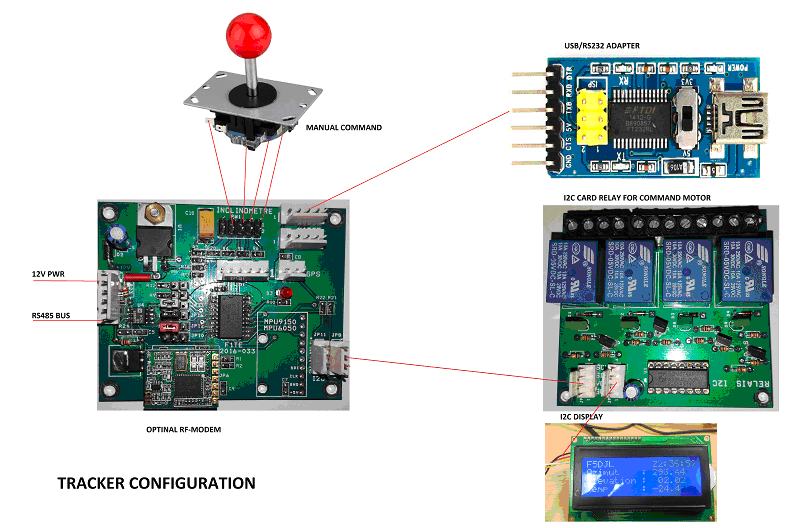
Figure 20 - Synoptique de la configuration "affichage/commande"
4.1 La carte PRINCIPALE du module
C'est le même circuit imprimé principal qui est utilisé. Comme les capteurs ne sont pas montés pour cette fonction d'affichage et de commande, les connecteurs JP2 et JP3 servent pour des fonctions d'entrée/sortie.
La pin 5 de JP3 délivre un signal PWM destiné à contrôler la vitesse des moteurs d'antenne. Ce signal PWM est généré soit manuellement par un Switch, soit en poursuite automatique lorsqu'il ne reste plus que 3° à rattraper.
Le bus I2C sert à raccorder un afficheur 4x20 caractères ainsi que la carte à relais décrite plus haut.
4.2 La commande manuelle
Pour commander manuellement la mise en route des moteurs d'élévation ou d'azimut, des switches de commandes sont prévus sur le connecteur 2x5 pins repéré SW1 sur le schéma. La mise à la masse exclusive d'une des pins 1 à 4 commandera la fermeture du relais correspondant sur la carte relais.
Cette commande peut se faire par des commutateurs à deux positions astables avec repos au centre. Une autre solution consiste dans l'utilisation des switches d'un joystick, comme dans l'illustration ci dessus.
4.3 L'afficheur I2C
On trouve de nombreux modèles quatre lignes de vingt caractères. Choisir un modèle avec son adaptateur I2C dont les 3 bits d'adresse A0, A1 et A2 sont au niveau "1" logique, soit en l'air.
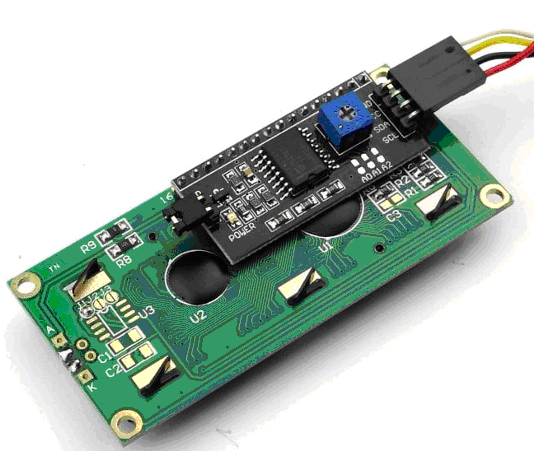
Figure 21 - Afficheur LCD et son adaptateur I2C
4.4 La carte relais
Décrite précédemment, elle se chaîne sur le bus I2C avec l'afficheur 4X20 caractères.
4.5 La communication RS232 - USB
JP3 est utilisé pour la connexion à l'UART du PIC et reçoit en niveaux TTL les commandes de tracking sur les pins 2 (GND) et 3 correspondant au signal RB5 du PIC.
Le protocole supporté est au format Easycom qui permet la gestion au dixième de degré. On utilise pour cette connexion au logiciel externe de tracking un adaptateur USB. Il en existe de nombreux construits sur la base d'un chip FTDI FT232. Eviter les adaptateurs à base de chip PROLIFIC, beaucoup de versions ne sont pas gérées sous Windows 10.

Figure 22 - Adaptateurs USB <=> RS232
Seules les connexions de masse et de données sont raccordées sur JP3. L'adaptateur étant lui même alimenté en +5V par l'interface USB.
5. Les différents firmwares
Plusieurs versions de micrologiciels sont disponibles en fonction des configurations requises.
Le module capteur peut être configuré pour les configurations suivantes :
-
Deux MAB25 pour le site et l'azimut.
-
Un MAB25 pour l'azimut et l'accéléromètre pour l'élévation
-
Une mesure analogique potentiométrique pour l'azimut et l'élévation, comme utilisée dans certains moteur Yaesu.
-
Une mesure analogique pour l'azimut et l'accéléromètre pour l'élévation.
-
A cela peut s'ajouter la gestion d'un GPS, la gestion de l'anémomètre-girouette.
Les éléments de code correspondants ne seront pas tous disponibles en même temps faute de la place nécessaire dans la mémoire du PIC choisi.
5.1 Le module capteurs
Il nécessite beaucoup de code pour gérer toutes les possibilités, en fonction des capteurs installés.
En version de base le firmware capteur peut gérer indifféremment un module inclinomètre MPU6050, MPU9150 ou GY-87 pour l'élévation ainsi qu'un MAB25 pour les mesures d'azimut. A noter que le module GY-87 permet dans cette version de transmettre aussi la température ainsi que la pression atmosphérique.
Le capteur GY-87 possède en plus un magnétomètre qui pourra ultérieurement servir de compas pour déterminer l'azimut par rapport au nord magnétique. Le code nécessaire est en développement.
5.2 Le module afficheur
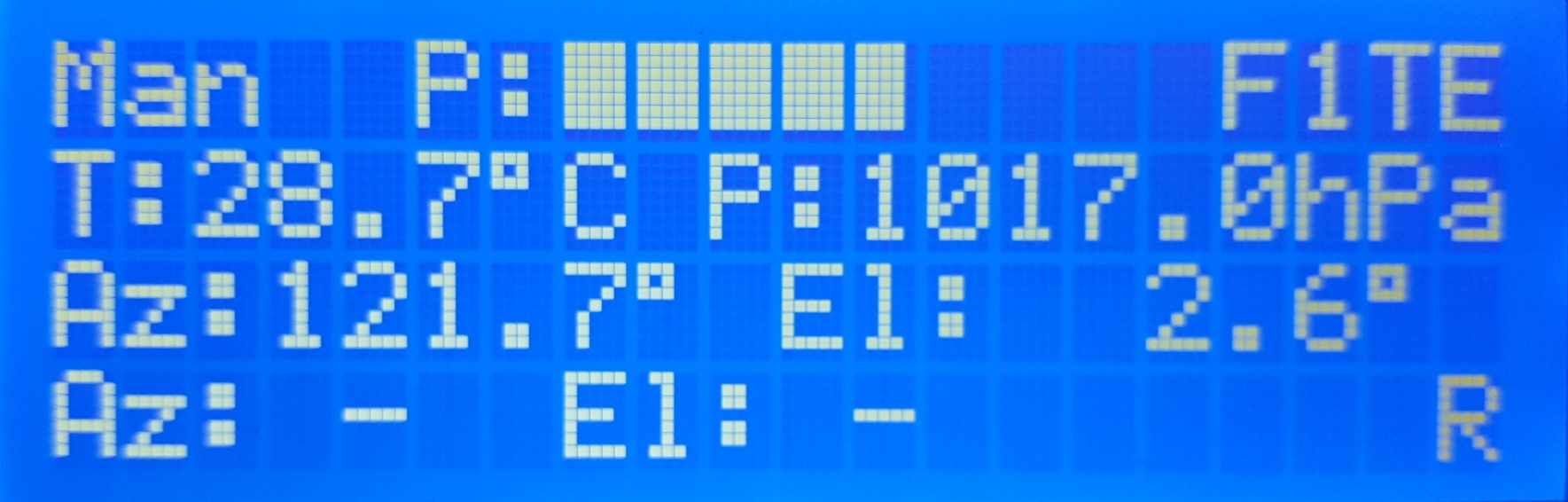
Le firmware du module afficheur est unique. Il assure l'affichage des données transmises et transmet les commandes vers la carte relais, qu'elle soit locale ou distante. Il supporte aussi le tracking automatique en gérant la communication avec le logiciel de contrôle via une COM série.
Figure 23 - Affichage
Les micrologiciels sont en évolution permanente pour améliorer les performances et les fonctionnalités.
6. Intégration du tracker
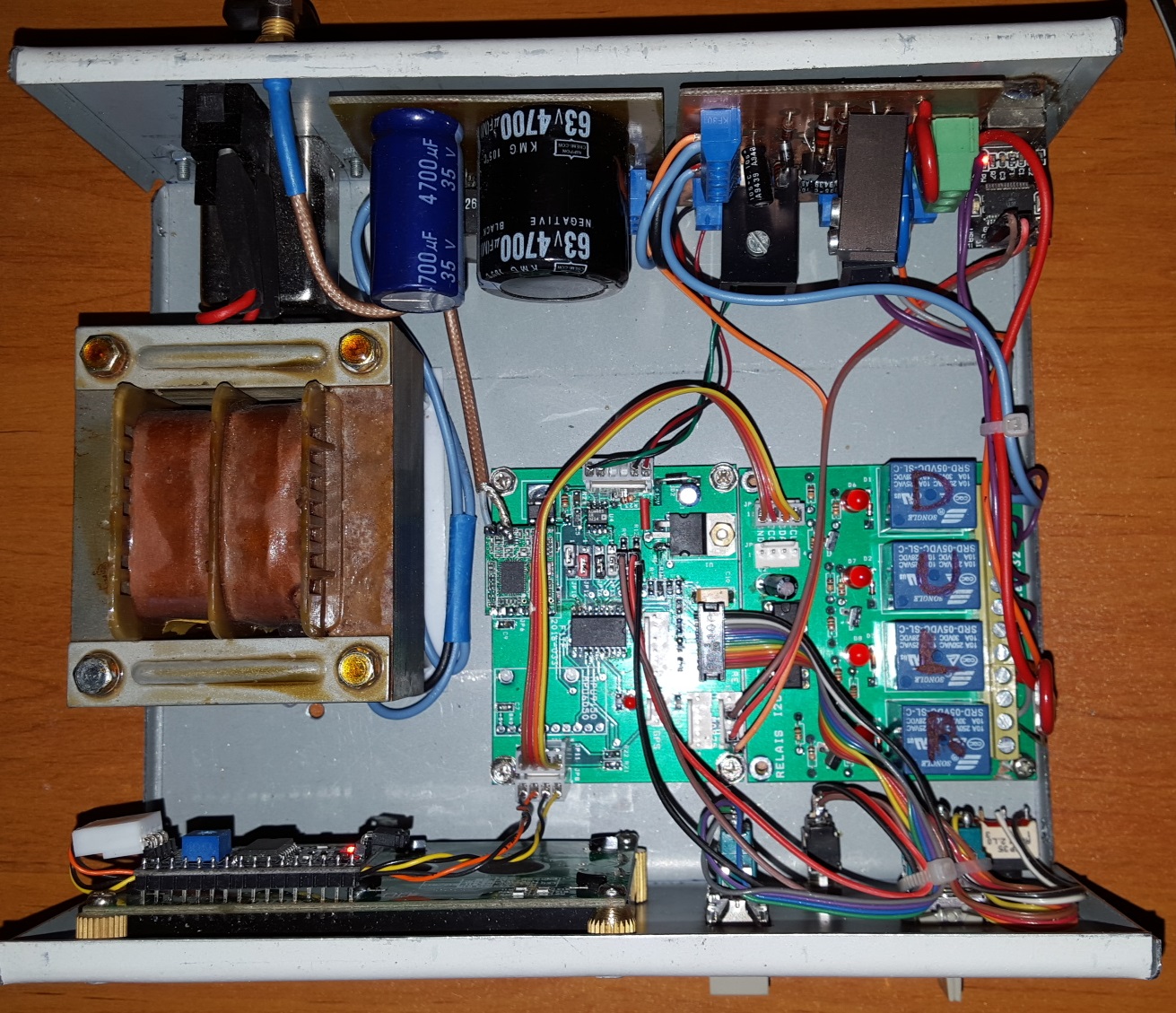

Figure 24 - Boitier de commande
6.1 Les raccordements
6.1.1 Les switches de commande de positionnement
Deux switchs deux positions astables avec repos au centre.
Ils sont raccordés sur le connecteur SW1 par une nappe 2x5 fils de type HE10
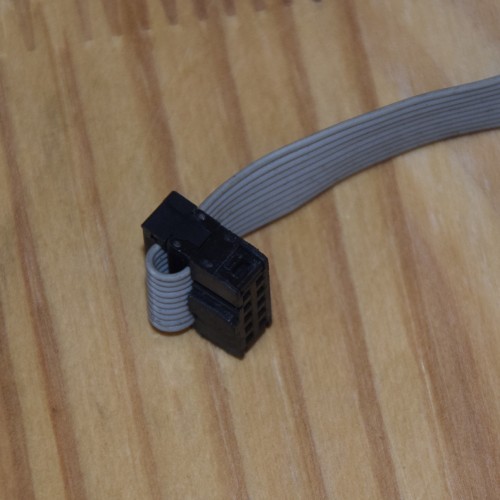
Figure 25 - Connecteur HE10 2x5
Les quatre premiers correspondent aux commandes exclusives de montée, descente, rotation droite et rotation gauche des antennes.
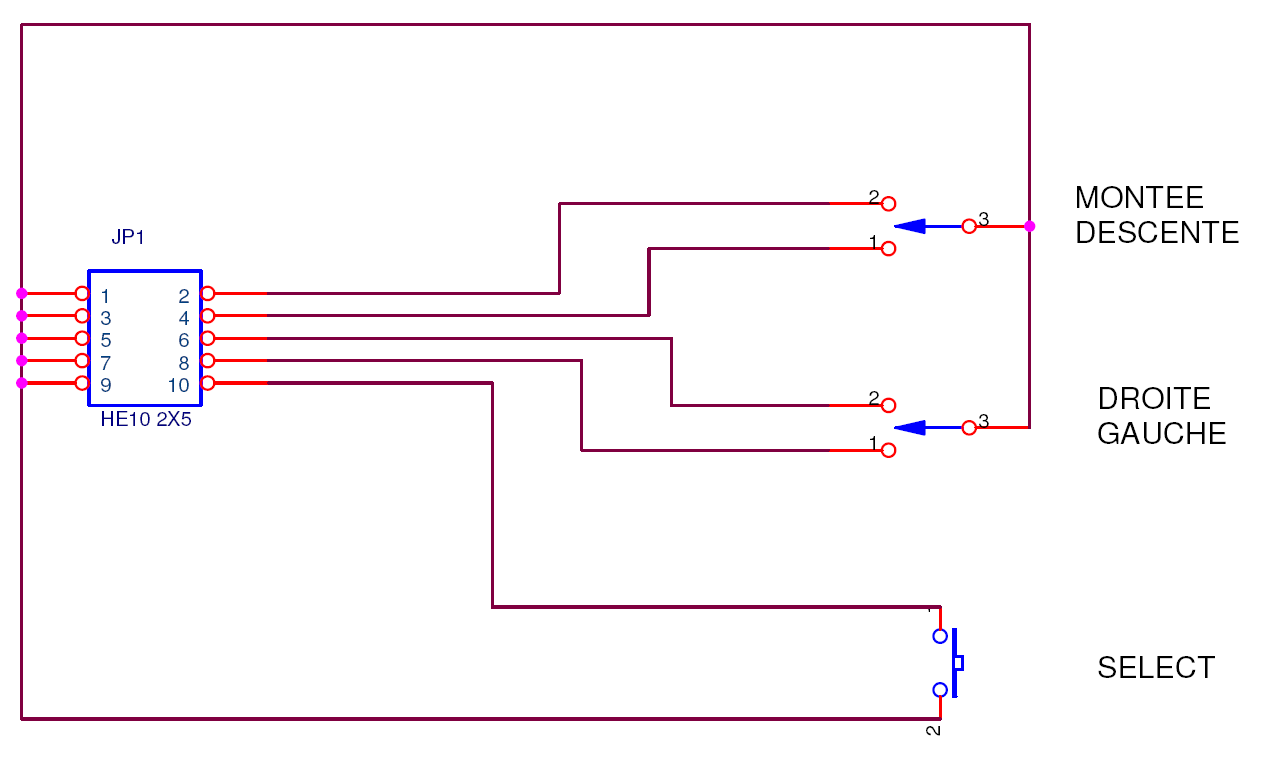
Figure 26 - Contacts de commande des moteurs
Le cinquième contact est une commande de configuration du tracker. Il est connecté à un poussoir momentané.
JP1 et JP17 sont raccordés à un commutateur à trois positions stables pour sélection de la vitesse, rapide ou lente, ainsi que pour la position poursuite automatique. La vitesse peut être contrôlée par un signal PWM disponible sur la pin 5 de JP2.

Figure 27 - Contacts du contrôle de positionnement
6.2 La configuration des platines
Les modules sont auto-configurés.
Durant la phase d'initialisation, le microprocesseur teste la présence ou non des différents capteurs possibles. De ce fait et pour tenir compte de certains timeout, la phase d'initialisation peut durer quelques secondes. Cette phase d'auto-configuration est bien sûr différente sur les deux modules, les périphériques I2C ne sont pas les mêmes dans chaque cas.
6.3 PROGRAMMATION des firmwares
Comme indiqué précédemment, il existe deux catégories de firmware, pour le module capteurs et pour le module affichage-commandes. Ils sont disponibles au téléchargement sur les sites donnés en annexe. Pour programmer le PIC il faut disposer d'un outil de programmation et du logiciel correspondant.
L'outil utilisé s'appelle le PICKIT3, disponible chez tous les distributeurs asiatiques et européens.

Figure 28 - PICKIT 3
Le programme utilisé est disponible en téléchargement libre chez Microchip.
Nous n'utiliserons pour cela que le programme IPE (Integrated Programming Environment) de la suite de développement MPLAB. La connexion du PICKIT3 se fait par le connecteur ICSP JP1 de la carte.
6.4 La calibration
Cette phase permet de synchroniser l'affichage réel de l'antenne par rapport aux données fournies par les capteurs. Il peut exister en effet un décalage ou offset entre les données du capteur et la direction réelle, dû au couplage ou au montage mécanique du capteur. Ce décalage permanent est ainsi compensé une fois pour toutes. Pour rentrer dans ce mode, il faut mettre sous tension le module de commande en ayant actionné le switch de commande "CW" ou rotation droite.
Une fois dans ce mode, les poussoirs de commande actionnent directement les moteurs site et azimut pour placer les antennes dans la position de référence dans ces deux plans.
Une fois les antennes dans la position connue en site et azimut, appuyez sur le poussoir "Select" de la figure 24.
Le module passe alors dans la phase de synchronisation de l'affichage. En actionnant les poussoirs de commande, on amène les indications de positions en coïncidence avec les valeurs de la position réelle des antennes.
Appuyez sur sélect pour mémoriser les offsets et quitter le mode calibration.
6.5Le mode manuel
La commande des moteurs se fait par l'action exclusive sur un des commutateurs de commande pour la montée ou la descente, la rotation droite ou gauche.
Deux modes manuels sont possibles, en vitesse rapide ou lente, conditionnée par l'utilisation du signal PWM délivré sur la pin 5 de JP2.
6.5.1 Alimentation des moteurs
Les contacts disponibles sur la carte relais permettent de commander des moteurs à courant continu basse tension en inversant la tension pour inverser le sens de rotation.
Dans l'exemple ci-dessous, un transformateur deux fois 12 à 15 volts alternatif permet de délivrer deux tensions continues de 15 et 30 volts pour deux moteurs.
Pour réduire la vitesse sans diminuer le couple, on peut s'inspirer de ce montage pour hacher la tension disponible. Ce montage convient pour un moteur continu 12 Volts pour l'azimut et un vérin 24 ou 36 V pour l'élévation.
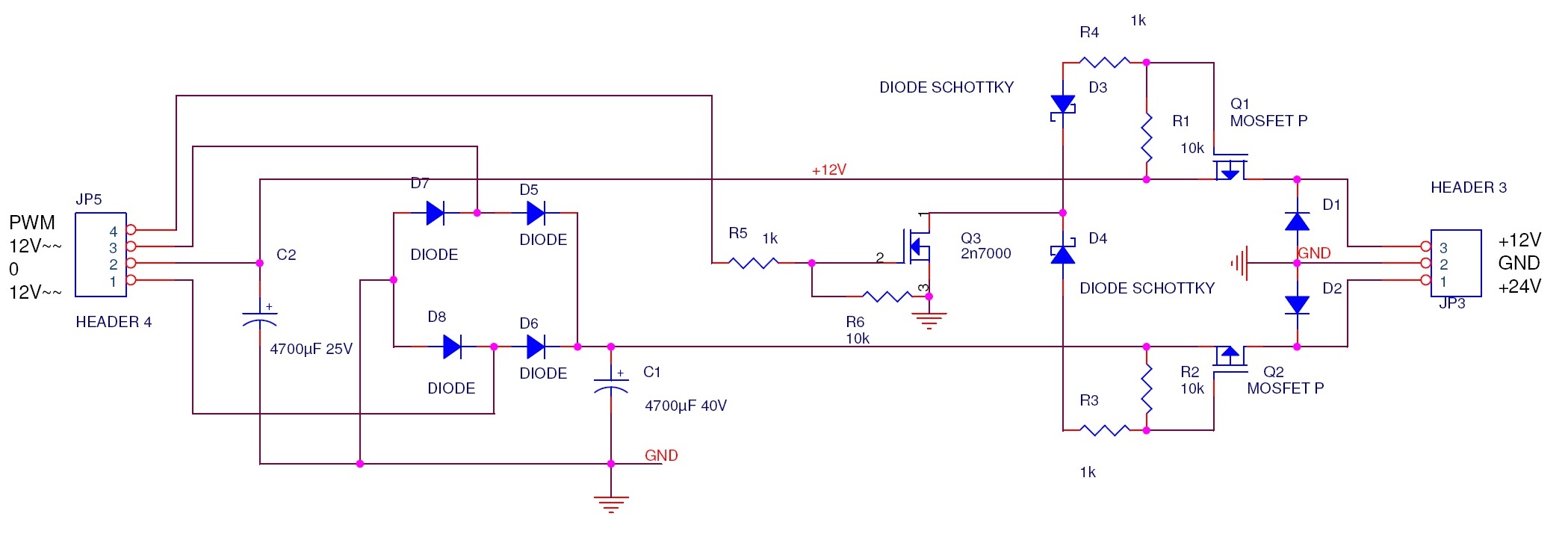
Figure 29 - Exemple d'alimentation des moteurs en courant continu
Pour des moteurs à courant alternatif comme on en trouve parfois, il faut utiliser un système différent pour le hachage de la tension.
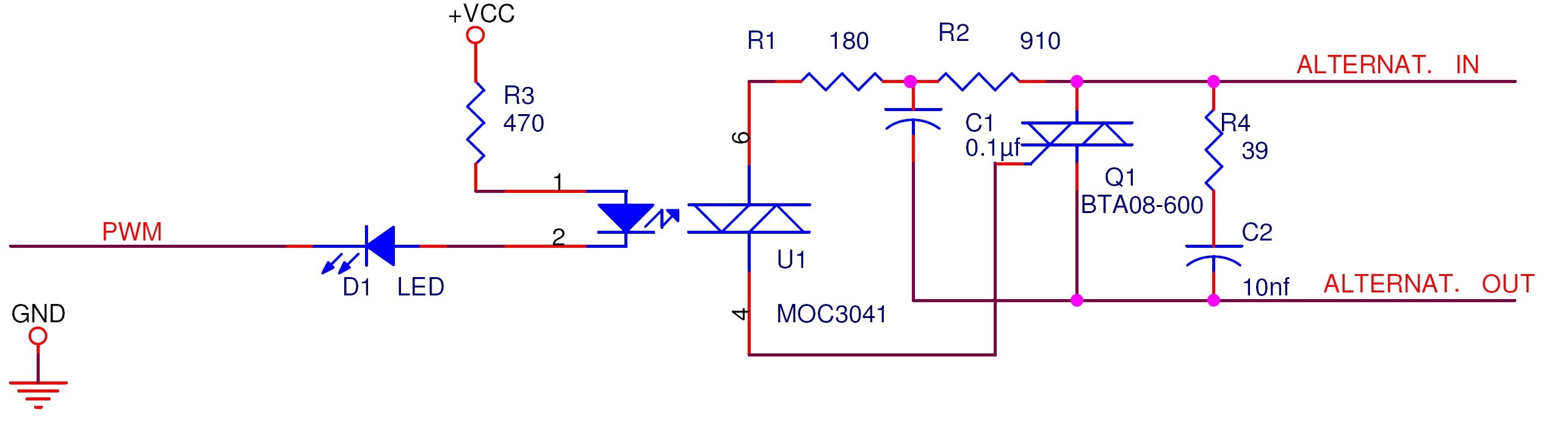
Figure 30 - Exemple de hachage d'une tension alternative
La commande PWM, dont le sens et le rapport cyclique doit être adapté, commande un opto-coupleur qui a la particularité de basculer au zéro de la tension alternative qui lui est appliquée, évitant ainsi au triac de procéder à des coupures en pleine puissance, limitant donc au maximum les parasites pouvant être générés par ce hachage.
Il existe dans le commerce des relais statiques qui offrent toutes ces caractéristiques.
Figure 31 - Relais statique
Ces deux montages, bien que déjà testés, sont donnés à titre indicatif.
6.6 Le mode poursuite automatique
Dans ce mode, dit aussi de tracking, les mouvements des moteurs sont déterminés par les commandes reçues sur l'adaptateur USB<=>Série au protocole Easycom.
Ce protocole a été choisi car il supporte des demandes de positionnement exprimant les dixièmes de degré. La vitesse de cette communication se fait à 9600 Bds, 8 bits sans parité. Seule la partie direction de la commande Easycom est analysée correspondant au format AZaaa.a ELeee.e
6.7 Les logiciels de tracking
Plusieurs programmes peuvent être utilisés pour envoyer les commandes de poursuite automatique via un ligne de communication asynchrone.
Le logiciel TrakSM de W4SM, disponible sur le WEB en téléchargement permet de poursuivre la lune et le soleil dans le protocole Easycom indiqué précédemment. Le logiciel TrakBox de IK7EZN est aussi utilisable. D'autres logiciels sont aussi possibles s'ils supportent les types de protocoles Easycom ou GS232.
7. Variante
Pour le contrôle de moteurs de marque Yaesu ou Kenpro, en azimut ou en élévation et dont la recopie de position est assurée par un potentiomètre, en général de 500 Ohms, il est possible de ramener directement ces informations potentiométriques directement sur la carte de contrôle-affichage, sur les connecteurs JP2 et JP3.
La carte contrôleur se charge alors de faire la conversion analogique pour disposer des informations de position et assurer ainsi le contrôle des moteurs à l'aide de la carte relais. Dans cette configuration, une seule carte microcontrôleur est alors nécessaire.
8. Conclusion
Ce développement répond aux besoins de positionnement précis des antennes THF pour les activités tropo, Meteor-scatter ou EME.
Le système est ouvert à de nombreuses autres fonctions grâce à l'emploi d'un bus I2C pour supporter de nombreux types de capteurs et d'interfaces supplémentaires, le firmware étant capable de s'adapter aux besoins dans la limite de la place mémoire disponible.
La réalisation par les lecteurs posant souvent un problème, nous avons décidé de céder les droits de distribution au REF qui pourra apporter son aide logistique en mettant les modules pré-assemblés à la disposition des membres dans sa nouvelle boutique en ligne. Aucune garantie n'est assurée par le REF, chacun étant libre de ne pas s'y fournir.
Remerciements aux beta-testeurs de la "liste HYPER" et à tout ceux à qui nous avons soumis notre projet et qui ont apporté remarques et suggestions.
73, Jean-Louis F5DJL et Lucien F1TE
Annexes
Les différents firmwares sont disponibles en téléchargement sur le site du REF
Cet article a été publié dans la revue Radio-REF d'octobre 2016
Les platines sont disponibles pour les membres du REF à la boutique en ligne de l'association